
Триммер на пульте управления
Обновлено: 18.04.2024

Предполетная подготовка. Первые шаги
Все правильно, с одной поправкой: квадрокоптер – это сложная система с четырьмя винтами и четырьмя электродвигателями и даже незначительные удары (например, при транспортировке) могут сбить заводские настройки. Поэтому перед первым полетом стоит заняться калибровкой квадрокоптера и настроить его на нормальный полет, чтобы избежать ненужных крашей.
Главная рекомендация – внимательно изучите инструкцию и просмотрите все имеющиеся в сети видео, относящиеся к вашей модели. Не все производители дотошно описывают важные моменты подготовки к пилотированию, особенно это касается китайских моделей, стоимостью 50 баксов.

Первое, что нужно сделать, после того, как вы достали дрон из коробки:
Найдите для дрона ровную поверхность (стол или пол). Важно, чтобы поверхность была идеально ровной по горизонтали, без уклонов. В противном случае произвести качественную калибровку не удастся.

Сопряжение беспилотника с контроллером
Теперь соединяем пульт с квадриком. Разные модели запрограммированы по-разному. Идеальный вариант – это прибегнуть к изучению инструкции или попросить помощи у опытного пилота.
Для большинства недорогих дронов нужно сделать следующее:
Для модели с 3-х осевым гироскопом – включите пульт и подождите 7-8 секунд. Пульт издает короткие сигналы – значит процесс идет. Длинный звук обозначает, что пульт уже связан с квадриком и можно пробовать взлетать.
Для моделей с 6-ти осевым гироскопом нужно поработать больше. Включите пульт ДУ. Переведите ручку газа (левый стик на пульте) в верхнее положение, затем в нижнее – теперь квадрик и пульт нашли друг друга и двигатели уже запускаются с переводом левого стика вверх. Можно лететь.
Калибровка простых моделей квадрокоптеров
Чтобы откалибровать квадрокоптер перед первым запуском, нужно перевести оба стика пульта управления в нижнее положение, а затем влево до упора. Когда прозвучит длинный звуковой сигнал, а светодиодная подсветка на дроне перестанет мелко моргать, дрон откалиброван и готов к запуску.
Это важно:
Если после калибровки датчиков, квадрокоптер все-таки тянет в сторону, для его качественной стабилизации нужно произвести триммирование (точную настройку).
Для этого используем триммеры снизу и слева от правого стика на пульте ДУ.

Опытные пилоты производят триммирование в полете (нужно поднять дрон на высоту не менее 0,5 метра). Как начинающий летчик, можете пробовать настроить коптер на земле. То есть взлететь, увидеть в какую сторону заносит дрон, приземлиться, сделать несколько кликов на нужную кнопку триммера, а затем снова подняться в воздух, чтобы ощутить разницу. И так до тех пор, пока квадрокоптер не зависнет идеально в воздухе.
Медленно, но уверенно.

Если не получается…
Если точная настройка квадрокоптера (триммирование) не дает нужного эффекта, возможно дело не в гироскопах. Может случиться, что двигатели расположены не симметрично или повреждены лопасти. Еще одна возможная причина – какому-то из моторчиков не хватает тяги, чтобы ровно поднять дрон в воздух. В этом случае не обойтись без опытного помощника или даже мастера.
Как пожелание.
Не спешите выжать из нового квадрика все соки в первый же день полетов!
Помните, что первые запуски, это для него всего лишь тестирование и проверка работоспособности, а для вас – проверка на выдержку.
Поэтому, не спешите, иначе рискуете разочароваться до того, как новинка принесет вам наслаждение.

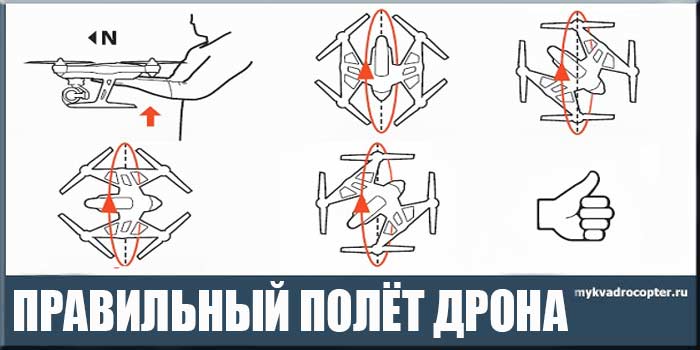
Перед тем, как приступать к своему первому полету, необходимо тщательно ознакомиться спультом радиоуправления и вертолетом. Изучение движения стиков (позиции 1 и 2 на всех рисунках) и плавности их хода позволит быстрее освоиться с реакцией вертолета на команды пульта управления.
На рис. 1 изображен трехканальный инфракрасный пульт управления вертолетом с соосной схемой несущих винтов.
1 - стик управления скоростью несущего винта
2 - стик управления направлением движения(повороты налево-направо, движение вперед-назад)
3 - триммер корректировки рыскания
.jpg)
На рис. 2 изображен другой вариант трехканального инфракрасного пульта управления вертолетом с классической схемой несущих винтов.
1 - стик управления скоростью несущего винта
2 - стик управления направлением движения (повороты налево-направо, движение вперед-назад)
3 - триммер корректировки тангажа
4 - триммер корректировки рысканья
.jpg)
На рис. 3 изображен универсальный пульт радиоуправления, в зависимости от выбранной модели вертолета, он может быть трехканальным или четырехканальным
1 - стик управления скоростью несущего винта и крена при четырехканальном управлении
2 - стик управления направлением движения (повороты налево-направо, движение вперед-назад)
3 - триммер корректировки тангажа
4 - триммер корректировки рысканья
5 - триммер корректировки чувствительности стика газа
6 - триммер корректировки чувствительности стика рулевого управления
7 - триммер корректировки крена
.jpg)
Настройка вертолетов с соосной схемой сводится к корректировке рысканья и производится следующим образом:
- вертолет устанавливается на свободную площадку;
- стиком управления скоростью вращения несущего винта плавно увеличиваем скорость вращения до начала смещения вертолета (не допускать взлета!);
- если наблюдается вращение фюзеляжа против часовой стрелки, то вращаем регулятор триммера корректировки рысканья по часовой стрелке до прекращения вращения вертолета;
- если наблюдается вращение фюзеляжа по часовой стрелке, то вращаем регулятор триммера корректировки рысканья против часовой стрелки до прекращения вращения вертолета.
Настройка вертолетов с классической схемой несущего винта осуществляется в два этапа.
.jpg)
Калибровка положения сервопривода :
- установить вертолет на ровную поверхность;
- включить пульт управления и вертолет;
- посмотреть на диск сервопривода, она должна быть параллельна поверхности, на которой установлен вертолет;
- если диск сервопривода не параллелен поверхности, на которой установлен вертолет, то необходимо произвести корректировку триммером тангажа.
- вертолет устанавливается на свободную площадку;
- стиком управления скоростью вращения несущего винта плавно увеличиваем скорость вращения до начала смещения вертолета (не допускать взлета!);
- если наблюдается вращение фюзеляжа против часовой стрелки, то нажимаем правый ( отмеченный буквой R) регулятор триммера корректировки рысканья до прекращения вращения вертолета;
- если наблюдается вращение фюзеляжа по часовой стрелке, то нажимаем левый ( отмеченный буквой L) регулятор триммера корректировки рысканья против часовой стрелки до прекращения вращения вертолета.
Калибровка положения сервопривода :
- установить вертолет на ровную поверхность;
- включить пульт управления и вертолет;
- посмотреть на диск сервопривода, она должна быть параллельна поверхности, на которой установлен вертолет;
- если диск сервопривода не параллелен поверхности, на которой установлен вертолет, то необходимо произвести корректировку триммером тангажа.
- вертолет устанавливается на свободную площадку;
- стиком управления скоростью вращения несущего винта плавно увеличиваем скорость вращения до взлета на высоту не менее полуметра;
- если наблюдается вращение фюзеляжа против часовой стрелки, то вращаем регулятор триммера корректировки рысканья по часовой стрелке до прекращения вращения вертолета;
- если наблюдается вращение фюзеляжа по часовой стрелке, то вращаем регулятор триммера корректировки рысканья против часовой стрелки до прекращения вращения вертолета.
Освоение стика управления скоростью вращения несущего винта (стик газа).
Для освоение реакции вертолета на прибавление газа необходимо взять вертолет за полозья и плавно прибавлять, а затем уменьшать газ.
Устанавливаем вертолет на свободную площадку и плавно увеличиваем газ до набора высоты, затем плавно убавляем газ для осуществления посадки. Это упражнение нужно делать до тех пор, пока Вы не добьетесь относительно мягкой посадки.
Рекомендация: если у вас не получается плавно взлететь с пола, то попробуйте взлететь с руки. Для этого возьмите вертолет за полозья и плавно прибавляйте газ, как только вы почувствуете, что вертолет начинает подъем, отпустите его. Это упражнение позволит Вам быстрее понять какой скорости вращения винта достаточно для взлета и снижения.
.jpg)
Для освоения зависания необходимо осуществлять ступенчатые наборы высоты и снижения, в процессе выполнения ступени нужно пытаться регулировать положения газа таким образом, чтобы вертолет зависал на заданной высоте.
В процессе выполнения первых упражнений, вы можете заметить, что при зависании вертолет отклоняется и не может зависнуть на одном месте. Это означает, что необходимо произвести более точную калибровку. Калибровка осуществляется триммерами аналогично первичной настройке до стабильно зависания.
Тренировка полета вперед-назад .
Данное упражнение позволяет обучиться правильному взаимодействию обеих рук для поддержания стабильного курса как по направлению, так и по высоте.
Для выполнения упражнения необходимо поднять вертолет в воздух и зафиксировать его на определенной высоте. После достижения определенной высоты нужно осуществить движения вперед и назад (задним ходом). В процессе движения вертолет будет постепенно терять высоту, ее нужно будет компенсировать стиком газа.
Движения вертолета по геометрическим фигурам .
Выполнение данного упражнения позволяет освоить навыки точного пилотирования. Для выполнения упражнения необходимо представить себе фигуру, например квадрат, затем описывать линии этой фигуры полетом вертолета.
Движение вертолета по геометрическим фигурам задним ходом .
Выполнение упражнения дает навык управления задним ходом, что значительно расширяет свободу маневров при пилотирования. Поскольку управление движения задним ходом является более сложным, то первые полеты следует проводить в сниженном темпе.
При выполнении полетов задним ходом важно помнить, что управление происходит зеркально.

Квадрокоптеры
Способ первый
Чтобы откалибровать квадрокоптер перед первым запуском, нужно перевести оба стика пульта управления в нижнее положение, а затем влево до упора. Когда прозвучит длинный звуковой сигнал, а светодиодная подсветка на дроне перестанет мелко моргать, дрон откалиброван и готов к запуску.
Если после калибровки датчиков, квадрокоптер все-таки тянет в сторону, для его качественной стабилизации нужно произвести триммирование (точную настройку).
Для этого используем триммеры снизу и слева от правого стика на пульте ДУ.
Опытные пилоты производят триммирование в полете (нужно поднять дрон на высоту не менее 0,5 метра). Как начинающий летчик, можете пробовать настроить коптер на земле. То есть взлететь, увидеть в какую сторону заносит дрон, приземлиться, сделать несколько кликов на нужную кнопку триммера, а затем снова подняться в воздух, чтобы ощутить разницу. И так до тех пор, пока квадрокоптер не зависнет идеально в воздухе.
Медленно, но уверенно.
Если не получается…
Если точная настройка квадрокоптера (триммирование) не дает нужного эффекта, возможно дело не в гироскопах. Может случиться, что двигатели расположены не симметрично или повреждены лопасти. Еще одна возможная причина – какому-то из моторчиков не хватает тяги, чтобы ровно поднять дрон в воздух. В этом случае не обойтись без опытного помощника или даже мастера.
Как пожелание…
Не спешите выжать из нового квадрика все соки в первый же день полетов!
Помните, что первые запуски, это для него всего лишь тестирование и проверка работоспособности, а для вас – проверка на выдержку.
Поэтому, не спешите, иначе рискуете разочароваться до того, как новинка принесет вам наслаждение.

Внутренняя система позиционирования дрона основана на работе гироскопа. В зависимости от показаний датчика, электроника автоматически регулирует обороты двигателей машины для поддержки стабильного положения. Система тестируется и запоминает настройки автоматически. Чтобы калибровать квадрокоптер, обычно достаточно:
- поставить устройство на ровную поверхность;
- включить питание или подсоединить аккумулятор;
- дождаться окончания тестирования.
Об окончании калибровки свидетельствует звуковой сигнал или световая индикация. Как делается настройка квадрокоптера, подробно изложено в инструкции по эксплуатации модели. У некоторых дронов процедура может быть сложнее. Например, чтобы откалибровать квадрокоптер, его нужно не только установить на ровную поверхность, но и покрутить в определенном положении по и против часовой стрелки.
Первый способ доступен владельцам коптеров, пульт которых оснащен триммерами регулировки. Они обычно распложены сбоку и снизу, пара для каждого джойстика. После того, как дрон поднят в воздух, выполняются следующие действия:
- при смещении вперед или назад, нажимается триммер сбоку от левого джойстика вверх или вниз;
- при вращении в какую-либо сторону недостаток устраняется триммером под левым джойстиком;
- смещения вперед-назад регулируются триммером сбоку от правого джойстика;
- уход влево-вправо компенсируется триммером под правым джойстиком.
Регулировка производится до тех пор, пока недостатки не будут устранены. Данная операция никак не влияет на работу дрона, делается калибровка только пульта.
Второй способ подходит для владельцев моделей без триммеров на пульте управления.
Совет! Пользоваться таким вариантом калибровки стоит только в тех случаях, когда машину тянет в сторону или ведет по направлению очень незначительно.
Чтобы компенсировать недостатки, потребуется настроить квадрокоптер. Операция эта долгая и кропотливая: следует подкручивать регуляторы двигателей для компенсации. После каждой попытки дрон поднимается в воздух для проверки правильности поведения.
Для дронов, у которых нет триммеров пульта, и присутствуют сильно выраженные отклонения, предусматривается процедура автоматической калибровки. Она подробно изложена в инструкции по эксплуатации.
Для того чтобы все прошло успешно и с первой попытки, рекомендуется как можно тщательнее выполнить начальную калибровку гироскопа дрона. Устройство устанавливается на ровную поверхность, включается, проходит предусмотренную производителем процедуру. Только после этого делается калибровка пульта.

Для систем, построенных на платах Ardupilot, предлагается программное обеспечение для изменения полетных параметров. Перед тонкой калибровкой, требуется задать начальные настройки регуляторов. Это делается следующим образом:
- включается пульт;
- левый джойстик устанавливается на максимум вверх;
- подключается питание дрона;
- электроника квадрокоптера сигнализирует готовность к базовой калибровке миганием светодиодов;
- отключается и снова включается питание дрона;
- после стандартного сигнала о состоянии батареи дрок издает короткий писк, что свидетельствует записи настройки максимальной тяги;
- левый джойстик опускается вниз до упора.
После того, как дрон издаст долгий сигнал — можно проверить работу двигателей. Затем газ убирают до минимума и отключают питание квадрокоптера для завершения начальной калибровки и установки параметрики по тяге. Дальнейшие тонкие регулировки производятся при помощи программного пакета mission planer.
Наша компания предлагает услугу по настройке многовинтовых летательных аппаратов любого назначения. В зависимости от сферы использования, наши специалисты выполнят настройку квадрокоптера таким образом, чтобы он был максимально отзывчивым и удобным для решения поставленных задач. Обычно услуга включает:
- Настройку электроники и аппаратуры управления;
- Настройку компаса, акселерометра и других датчиков;
- Настройку регуляторов скорости двигателей;
- Регулировку отзывчивости джойстиков (пульта управления);
- Прошивку или перепрошивку аппарата (в случае необходимости).
Правильно выполненная настройка квадрокоптера делает его максимально управляемым в любом режиме полета.
Итак, ваш новый квадрокоптер уже перед вами, но вы пока не умеете его запускать. С чего начать?
- Первым делом нужно собрать дрон . Почти все они поставляются в частично разобранном виде, поэтому навыки сборки конструктора вам очень пригодятся.
- Припасите запасной аккумулятор. Современные модели редко могут протянуть в воздухе больше 10 минут. А для полноценной тренировки этого времени не достаточно.
- Обязательно прикупите несколько запасных частей. Аварии неизбежны, а особенно часто ломаются именно пропеллеры.
- Далее следует откалибровать и настроить датчики : акселерометр, компас и GPS.
Остается только бегло просмотреть прилагаемую инструкцию и можно попробовать поднять в воздух свой первый аппарат.
Синхронизация с пультом
У большинства дронов китайского производства, таких, как Syma, процесс синхронизации очень простой. Пульт достаточно включить и дождаться звукового или светового сигнала от дрона. Так происходит у большинства моделей, построенных с использованием трехосевого гироскопа.
Чтобы подключить пульт для дрона с шестью степенями свободы позиционирования, необходимо:
- включить пульт;
- переместить джойстик тяги вверх;
- опустить левый джойстик вниз;
- получить подтверждение от дрона в виде звукового сигнала или световой индикации.
Как вы уже догадались никакие курсы управления заканчивать не нужно, а управлять дроном придется с помощью специального пульта. По сути, все пульты для квадрокоптеров стандартны и слегка напоминают джойстики для игровых приставок. Они оснащаются двумя рычагами управления, где левый обычно связан с движением в вертикальной плоскости, а правый в горизонтальной.
Некоторые современные модели также имеют поддержку управления через приложение в смартфоне. При этом сам дрон и телефон нужно соединить через WiFi.
Режимы
Перед запуском обязательно нужно ознакомиться с режимами, которые встроены в ваш дрон.
- Ручной полет. Это самый сложный режим, но в то же время и самый интересный. В нем вы полностью берете управление на себя, а никакая дополнительная стабилизация не работает. Отлично подходит для тех, кто уже немного освоился в управлении и хочет поднять свой уровень мастерства пилотирования и научиться исполнять трюки.
- Стабильный полет. Он рассчитан на съемку фотографий или видео. Выбирая его, в работу вступает встроенный акселерометр, который позволит стабильно удерживать аппарат в воздухе. Этот режим можно назвать режимом для новичков, который идеально подойдет для всех тех, кто только что приобрел оборудование.
- GPS навигация. В этом режиме можно задать маршрут, по которому дрон сделает пролет. Своего рода автопилот и удобная фишка, особенно если вы не хотите контролировать каждый шаг своего БПЛА.
- Управление дроном с телефона. Каждая современная модель квадрокоптера может управляться со смартфона или планшета (причем работает и на Android и на iOS). Дрон ведёт прямую трансляцию картинки, которую захватывает его камера. Ее отображает мобильное устройство, подключенное к коптеру напрямую через WiFi. Очень полезная вещь, рекомендуем!
Проверка полета
Чтобы определить, что требуется калибровка регуляторов квадрокоптера, нужно поднять машину в воздух. Это бесполезно делать в комнате или на малой высоте. В ограниченном пространстве машина будет парить на воздушной подушке, сформированной потоком от винтов. Квадрокоптер следует запускать на улице, поднимая на высоту не менее 50 см. О необходимости калибровки свидетельствуют следующие варианты поведения:
- дрон тянет в сторону;
- машина заваливается на бок;
- квадрокоптер перемещается вперед или назад;
- устройство вращается в воздухе в горизонтальной плоскости.
Выявленные недостатки могут быть незначительными. Но при свободном полете они способны сильно повлиять на поведение дрона, ухудшая его управляемость и предсказуемость. Необходима калибровка квадрокоптера.
Как научиться поднимать квадрокоптер?
Ни в коем случае не торопитесь, и не старайтесь поднять его на огромную высоту. Для начала можно обойтись простыми маневрами.
Например, попробуйте взлететь, развернуть дрон, отдалить его от себя на несколько метров. Если вы новичок, не стоит тренироваться в помещениях. Для этого лучше найти спокойную и тихую площадку, где отсутствует ветер. Почему погода должна быть безветренной? Прежде всего, вы сможете научиться ощущать квадрокоптер, привыкнуть к тонкостям его управления.
Кроме того, ветряной поток способен вызывать ряд сложностей во время полета. Нередко приходилось сталкиваться с ситуациями, когда новички не успевают быстро остановить устройство, и оно врезается в окружающие предметы.
Советы и типичные ошибки

На первых этапах никогда не запускайте аппарат слишком высоко, особенно в тех ситуациях, когда недалеко от вас находится огромное количество людей. При совершении малейших ошибок техника может не только упасть и сломаться, но также травмировать окружающих людей. Вращающиеся лопасти могут нанести серьезные увечья.
Останавливайте свой выбор на безлюдных местах, желательно не асфальтированных. Таким образом, когда устройство всё-таки упадет, оно не получит сильные повреждения корпуса.
Если вы новичок, никогда не направляйте аппарат сторону рек. Затем, уже после освоения базовых навыков, вы сумеете полноценно пользоваться квадрокоптером над реками, на территории парков и мест, где сосредоточено большое количество людей.
Неопытным пользователям не нужно приобретать дорогостоящие модели. Вне зависимости от аккуратности обучения управлению или места для тренировочных полетов, всё-таки нередко приходится сталкиваться с ситуацией, когда коптеры падают. С другой стороны, техника предлагает широкие возможности для новичков, упрощающих маневрирование в сложных местах – четвертые Фантомы даже анализируют обстановку с помощью бортовых датчиков, предотвращая столкновения.
Перед тем как начать тренировку, заранее убедитесь в том, что аккумуляторная батарея, установленная на борту, полностью заряжена. Категорически запрещается запуск летательных устройств, в которых заряд батареи составляет не более 50%. Во-первых, тренировка окажется непродолжительной, а во-вторых, при наборе большой высоты устройство может полностью разрядиться ещё в воздухе.
Беспилотник — это устройство с простой схемой управления. Набравшись немного практики, вы сами убедитесь в этом.
Подготовка к полету и настройка вертолета
Хотя большинство моделей вертолетов на радиоуправлении продаются в комплектации RTF (то есть в собранном виде), не торопитесь с запуском. Как минимум необходимо зарядить аккумулятор, соединиться с пультом и выполнить калибровку сервопривода, чтобы дальше управлять вертолетом без проблем. Совершенно нелишней окажется и корректировка рысканья.

Подключение пульта к радиоуправляемой модели вертолета выполняется в следующей последовательности:
- включаем пульт управления;
- вставляем аккумулятор в вертолет;
- соединяем оба устройства.
Калибровка сервопривода радиоуправляемого аппарата проводится следующим образом:
- Вертолет ставим на горизонтальную поверхность и соединяем его с аппаратурой управления.
- Обращаем внимание на диск сервопривода. Он должен быть параллелен поверхности.
- Если диск не параллелен, производим его корректировку триммером тангажа.
Корректировку рысканья, чтобы управлять моделями без проблем, следует проводить так:
- Радиоуправляемый вертолет ставим на горизонтальную поверхность и соединяем его с пультом управления.
- Скорость вращения несущего винта плавно увеличиваем с помощью стика управления скоростью до начала смещения модели, но не допускаем ее взлета.
- При вращении фюзеляжа по часовой стрелке вращаем регулятор триммера корректировки против часовой стрелки до тех пор, пока вертолет не перестанет поворачиваться.
- При вращении фюзеляжа против часовой стрелки регулятор триммера корректировки поворачиваем по часовой стрелке до тех пор, пока радиоуправляемый беспилотник не перестанет вращаться.
Нелишним будет освоить, как управлять газом, заодно потренировавшись в посадке летательного аппарата.
- берем модель за шасси, плавно прибавляем и уменьшаем газ. Так вы получите представление о возникающей подъемной силе;
- устанавливаем радиоуправляемый беспилотник на горизонтальную поверхность и плавно отклоняем стик, добавляя газ. Набираем высоту, после чего так же плавно приземляемся.
Освоиться, как управлять моделями вертолетов, помогут симуляторы. Они очень точно моделируют основные ситуации.
Основы управления вертолетом
Хотя речь идет о моделях на радиоуправлении, к ним применимы принципы управления настоящими вертолетами.

Мы рассмотрим основные понятия, как управлять радиоуправляемым вертолетом, расскажем, какие силы оказывают влияние на летательный аппарат и как они распределяются в разных режимах полета. Теория поможет вам быстрее освоить управление, вы поймете, почему модель ведет себя так, а не иначе.
Эффект земли
Так называемый эффект земли можно наблюдать при зависании вертолета над поверхностью на высоте, несколько меньшей диаметра основного ротора.

Создаваемая лопастями ротора скорость воздушного потока не способна достигнуть максимальных значений из-за небольшого расстояния радиоуправляемой модели до поверхности. Летательный аппарат оказывается над своеобразным пузырем, созданным воздухом высокого давления.
Настоящие вертолеты при возникновении эффекта земли теряют устойчивость, управлять ими сложно. Поведение аппарата можно сравнить с поведением человека, оказавшегося на большом шаре. Радиоуправляемые модели также могут испытывать проблемы с устойчивостью, находясь на небольшом удалении от поверхности, однако однозначного мнения на этот счет нет. Некоторые моделисты утверждают, что ничего подобного не наблюдали либо эффект был слабо выражен.
Большое значение имеет ветер. Если он сильный, то воздух высокого давления выдувается из-под радиоуправляемого вертолета, влияние эффекта заметно уменьшается, управлять моделью проще.
Подъем и снижение
При зависании вертолета над землей подъемная сила, развиваемая лопастями ротора, равняется весу летательного аппарата. Чтобы радиоуправляемый беспилотник поднялся выше, необходимо увеличить подъемную силу, то есть она должна стать больше веса. Для снижения ее нужно уменьшить.

Скорость подъема вертолета зависит от разницы между подъемной силой, развиваемой несущим винтом на максимальной мощности, и силой тяжести. Чем значительнее разница, тем быстрее поднимается летательный аппарат.
Для взлета рекомендуется выбирать горизонтальную поверхность. Почему управлять на ней аппаратом легче? Все дело в том, что при подъеме с наклонной поверхности диск вращения ротора также наклоняется, а подъемная сила разделяется на две составляющие: горизонтальную и вертикальную. Соответственно, горизонтальная составляющая силы будет перемещать радиоуправляемую модель в сторону наклона поверхности сразу после взлета.
Чтобы избежать дрейфа, следует находить для взлета ровную поверхность. Если же такой возможности нет, тогда управлять так: диск ротора наклонить в обратную углу наклона сторону, чтобы все-таки обеспечить вертикальный взлет. При этом ручку, чтобы управлять автоматом перекоса, следует перед отрывом переместить вправо, сразу после отрыва от земли вернуть в нейтральное положение.
Висение
При зависании модели на радиоуправлении в воздухе подъемная сила основного винта равна силе веса вертолета. Беспилотник не опускается и не поднимается, оставаясь в одной горизонтальной плоскости. Так как изменить в полете вес радиоуправляемой модели мы не в силах, нам остается управлять силой тяги (подъемной силой).

Управлять подъемной силой возможно через:
- изменение общего шага (угла установки лопастей);
- изменение количества оборотов.
Соответственно, есть две модели. В первой вариант, как управлять тягой, реализован через изменение угла установки лопастей. Это модель с общим шагом. Вторая модель с фиксированным шагом предполагает, что угол остается неизменным, а управлять тягой винта, изменяя ее, можно через регулирование количества оборотов.
Перемещение по горизонту и разворот
Разложив общий вектор подъемной силы несущего винта на составляющие, мы увидим, что он определяется суммой векторов тяги задней и передней лопасти. Оба этих вектора могут изменяться в зависимости от того, где находятся лопасти относительно продольной оси. Это дает возможность управлять вертолетом в горизонтальной плоскости.

Подъемная сила, образуемая задней частью диска вращения, оказывается выше, чем сила передней части. В результате нос опускается, тогда как хвостовая балка поднимается. Радиоуправляемая модель двигается вперед.
При движении вперед подъемная сила (вернее, ее вертикальная составляющая) по-прежнему равняется весу радиоуправляемого аппарата. Что касается горизонтальной составляющей, то ее увеличение или уменьшение определяет величину тягу в горизонтальном направлении.
Управлять направлением полета в горизонтальной плоскости можно с помощью ручки перекоса:
- Ее можно передвинуть вперед, аппарат перекоса наклонится вперед (нос опустится).
- Для выравнивания автомата нужно вернуть ручку в нейтральное положение.
- Наклонив ручку назад, вы наклоняете аппарат назад (нос поднимается).
Для того чтобы выполнить разворот, радиоуправляемую модель необходимо накренить.
Предположим, что мы хотим развернуть летательный аппарат вправо. Как управлять вертолетом в этом случае? Вектор силы веса по-прежнему остается перпендикулярным земле, тогда как вектор подъемной силы перпендикулярен диску вращения и наклонен вправо по отношению к горизонтальной поверхности на некий угол. В результате вертикальная составляющая вектора подъемной силы все также противодействует силе веса, а горизонтальная составляющая начинает толкать модель вправо, тем самым разворачивая ее.
Так как беспилотник выполняет поворот, будучи наклоненным в одну из сторон, значение вертикальной составляющей вектора силы уменьшается и становится меньше веса, зато появляется горизонтальная составляющая. При этом вес радиоуправляемого аппарата остается неизменным. Если все оставить, как есть, то при каждом повороте вертолет будет снижаться, что нас вряд ли устраивает, если мы хотим оставаться в одной горизонтальной плоскости.
В этом случае управлять следует так: необходимо увеличить подъемную силу с помощью ручки управления тангажем. Нужно переместить нос вверх, чтобы сделать больше угол атаки несущего винта.
Крен и боковое перемещение

Изменением подъемной силы разных сторон ротора можно управлять креном вертолета влево или вправо. Для совершения крена необходимо переместить ручку управления аппаратом перекоса влево или вправо. Радиоуправляемый аппарат начнет наклоняться, вместе с ним будет совершать крен и модель.
Гироскопическая прецессия
Ротор радиоуправляемого вертолета по своему поведению похож на гироскоп, это означает, что ему присуща гироскопическая прецессия.
Из-за этого явления лопасть с уменьшенным шагом и лопасть с возросшим шагом окажутся на минимальном и максимальном отклонении от горизонтальной плоскости, сделав поворот на 90 градусов.
Когда лопасть оказывается перпендикулярно продольной оси летательного аппарата над хвостовой балкой, она демонстрирует максимальный взмах и тягу. В этот момент устанавливается максимальный шаг, что позволяет успешно управлять моделью, то есть выполнить ее наклон вперед.
Подъемная сила при косом обтекании
При горизонтальном полете подъемная сила становится больше благодаря увеличению скорости воздушного потока и увеличению количества воздуха, проходящего через пропеллеры.

При перемещении радиоуправляемого беспилотника в горизонтальной плоскости возникает дополнительная подъемная сила при так называемом косом обтекании. И она зависит от горизонтальной скорости модели. Чем быстрее летит радиоуправляемый вертолет, тем существеннее сила. Ее легко распознать, так как происходит заметное улучшение летных характеристик.
Сила от перемещения возникает и при зависании на одном месте при условии, что дует ветер. Можно уменьшить мощность двигателя, тем самым сэкономив заряд батареи. Впрочем, если ветер порывистый, управлять летательным аппаратом сложно, так как приходится постоянно компенсировать то возрастающую, то уменьшающуюся силу. По этой причине управлять висением в воздухе лучше либо в полный штиль, либо при устойчивом ветре.
Авторотация
Под авторотацией понимается полет с остановленным двигателем. Вращение ротора вертолета происходит по инерции и благодаря действию воздуха, дополнительно раскручивающего лопасти при снижении радиоуправляемой модели.

При включенном двигателе воздушный поток оказывается нисходящим. Если же движок выключается в полете, снижение происходит с авторотацией, а воздушный поток становится восходящим.
Воздух переводит лопасти на отрицательный шаг, ротор продолжает вращение, вертолет может совершить управляемое снижение и приземлиться.
Не все радиоуправляемые модели обладают способностью к авторотации. Для этого в системе ротора должна быть установлена обгонная муфта, позволяющая лопастям свободно вращаться после остановки мотора. Возможность авторотации не является обязательной для летательных аппаратов. Однако в случаях, когда главный двигатель внезапно отказывает, ротор без авторотации останавливается, приземление происходит жестко, зачастую с повреждениями. Стремительная потеря высоты и быстрое снижение могут привести к печальным последствиям.
Рысканье
Под рысканием понимаются угловые движения радиоуправляемой модели относительно вертикальной оси. Упрощенно говоря, это повороты корпуса влево или вправо в горизонтальной плоскости.

Одной из причин того, почему для вертолетов на радиоуправлении рекомендуются специальные пульты, как раз и является возможность быстро управлять рысканьем, компенсируя его. Можно использовать и стандартную аппаратуру от радиоуправляемых квадрокоптеров или самолетов, однако вам придется вручную управлять скоростью вращения лопастей хвостового ротора, чтобы удерживать нос летательного аппарата прямо.
В обычных пультах такой возможности нет, поэтому каждый раз, когда вы будете поднимать или опускать вертолет, придется вручную управлять тягой. То есть увеличивать или уменьшать тягу хвостового ротора, чтобы компенсировать увеличение или уменьшение реактивного момента. Это не очень удобно, хотя и несмертельно. В пультах для радиоуправляемых вертолетов все гораздо удобнее, так как есть:
- ручка, чтобы управлять тангажом;
- ручка, чтобы управлять дросселем;
- кнопки для снижения и для подъема.
Как избежать аварий: частые проблемы
У начинающих пилотов первые запуски обычно завершаются или падением, или не самым мягким приземлением. Как правило, летательные аппараты успешно переживают жесткую посадку благодаря прочному корпусу и раме, однако у любой радиоуправляемой техники есть предел.

Очередная авария вполне может завершиться походом за запчастями или даже за новым радиоуправляемым вертолетом. Именно поэтому так важно научиться правильно им управлять.
Не взлетает
Вертолет радиоуправляемый может не взлетать по нескольким причинам.
В первую очередь проверьте аккумулятор. Если он разряжен, у двигателя не хватит мощности, чтобы поднять летательный аппарат в воздух. Большие радиоуправляемые модели в этом отношении особенно чувствительны, так как их двигателям нужно много энергии для взлета.
Еще одной причиной того, почему модель не может взлететь, а вы ей управлять, являются изношенные шестерни в системе привода. Внимательно осмотрите систему: если такие шестерни обнаружатся, замените их.
Крутится на месте
Бывает и так, что лопасти вращаются с необходимой скоростью, но радиоуправляемый вертолет не взлетает, крутится на одном месте, заносится в сторону.
Скорее всего, с двигателем и регуляторами хода все нормально, а причина в неисправности главного вала. Обычно вал получает повреждения в результате падения или столкновения, управлять аппаратом далее невозможно.
На этом пока все, не забывайте подписываться на наши статьи и делитесь полезными материалами в социальных сетях. До новых встреч.
Читайте также: