
Как написать программу для робота пылесоса
Обновлено: 24.04.2024

Хотите изучить робота, но у вас нет возможности его купить? А может, вы просто не знаете с чего начать? Тогда симулятор роботов Webots вам отлично подойдет! Научитесь легко управлять роботами в любых средах и создавать своих собственных роботов. Больше всего вам понравится то, что Webots — это бесплатный симулятор с открытым исходным кодом. Мы познакомимся с Webots и напишем программу для робота E-puck (Е-шайба), приводящую его в движение.
Мой опыт работы с Webots
В рамках научного исследования м е ня попросили помочь разработать алгоритмы обхода препятствий в нишинговом методе оптимизации роя частиц (PSO) для роботизированной многоцелевой поисковой системы. С этого и началось моё знакомство с Webots. Роботов помещают в зону поиска и они перемещаются, выслеживая цели. Благодаря нишинговому алгоритму PSO роботы делятся друг с другом информацией о том, где лучше встать относительно возможного расположения цели, и таким образом им удаётся находить самые оптимальные допустимые позиции. В симуляции участвовало 40 роботов и 4 цели.
По моему опыту Webots прост в освоении и применении, он полностью оснащён инструментами и реалистичен. Наконец, не нужно тратить деньги на покупку настоящих роботов 😎. И совсем скоро вас ждет знакомство с проектом.
Webots — это симулятор роботов с открытым исходным кодом, который предоставляет полноценную среду разработки для моделирования, программирования и симуляции роботов. Тысячи учреждений по всему миру используют его для научных исследований и обучения. Webots был разработан совместно со Швейцарским федеральным технологическим институтом в Лозанне, тщательно протестирован, сопровожден грамотной документацией и постоянно обслуживается, начиная с 1998 года. Это самый эффективный способ быстро достичь профессиональных результатов. [Источник]
Возможности Webots
- Разработка собственных роботов или работа с готовыми вариантами.
- Разработка трехмерной кастомизированной среды (поверхность, препятствие, цель, небо, физическая модель поведения).
- Разработка логики робота.
- Симуляция и тестирование.
- Видеозапись или скриншот симуляции.
Области исследования Webots
Многие проекты мобильной роботехники на протяжении долгих лет опираются на Webots в следующих областях:
- прототипирование мобильных роботов (научные исследования, автомобильная промышленность, авиация и воздухоплавание, производство пылесосов и игрушек, хобби и т. д.);
- исследование способов передвижения роботов (роботы с механическими конечностями, человекообразные, четвероногие роботы и т. д.);
- многоагентное исследование (роевой интеллект, группы совместно работающих мобильных роботов и т. д.);
- исследование адаптивного поведения (генетический алгоритм, нейронные сети, ИИ и т. д.);
- обучение робототехнике (лекции по робототехнике и программированию на C/C++/Java/Python и т. д.);
- состязания роботов — например, Robotstadium и Rat’s Life.
Симуляция Webots
Симуляция Webots состоит из следующих компонентов:
- world-файл (.wbt) Webots, определяющий одного или нескольких роботов и их среду.
- иногда файл .wbt зависит от внешних proto-файлов (.proto) и текстур.
- одна или несколько программ для контроллеров роботов (на C/C++/Java/Python/MATLAB);
- дополнительный плагин моделирования физики для модификации стандартного физического поведения Webots (C/C++).
Роботы Webots
Webots располагает большим разнообразием готовых роботов, среди которых:
- робот E-puck (двухколесный).
- робот Parallax Boe-Bot (трехколесный).
- четырехколесный робот.
- гексапод (шестиногий робот).
- робот-манипулятор Robotics на шасси.
- человекообразный робот.
- собакообразный робот.
Язык программирования
Вы можете написать программу для контроллера робота в Webots на C++, Java, Python или MATLAB. Выбирайте свой любимый язык программирования.
Пользовательский интерфейс Webots
Графический интерфейс пользователя состоит из 4 основных окон:
- 3D окно отображения, позволяющее взаимодействовать с 3D-симуляцией.
- дерево сцены, то есть иерархическое представление текущего мира.
- текстовой редактор для корректировки исходного кода.
- консоль, отображающая выходные данные как компиляции, так и контроллера.
Руководство
Webots предоставляет превосходное, понятное руководство и обучающую программу.
E-puck — это небольшой и простой в эксплуатации мобильный робот, разработанный GCtronic и EPFL, который широко используется в научных и образовательных целях. [Источник]
С 2005 года около 3000 моделей данного робота успешно применяются в образовании и исследованиях. С января 2018 года стала доступна 2 версия E-puck. [Источник]
E-puck относится к неголономным колесным роботам, которые зависят от вектора своего движения и не могут свободно перемещаться в любых направлениях без разворота. В отличие от них голономные способны двигаться в разных направлениях, не разворачиваясь.
Предлагаю вашему вниманию простое руководство по созданию среды, добавлению препятствий и робота E-puck, а также программу, направляющую движение робота вперед. Установите Webots на ваш компьютер согласно инструкции. В данном проекте использована версия Webots 2019b.
1. Создание директории проекта
- В меню нажмите сначала Wizards (Мастера), а затем в подменю — New Project Directory (Директория нового проекта).
- Нажмите Next .
- Выберите директорию для нового проекта, затем — Next .
- Выберите имя для нового мира. В данном проекте он называется main.wbt ) и отметьте необходимые компоненты (я выбрал Center view point (Центральная точка обзора), Add a textured background (Добавить текстурированный фон), Add a directional light (Добавить направленный свет) и Add a rectangle arena (Добавить прямоугольную арену). После этого нажмите Next и Finish .
2. Добавление робота E-puck
Выберите последний узел RectangleArena из отображаемого дерева сцены и нажмите кнопку Add , то есть знак плюс в его верхней части. В диалоговом окне выберите PROTO nodes (Webots) / robots / gctronic / e-puck / E-puck (Robot) , затем снова — Add . Робот должен появиться в центре арены. Сохраните симуляцию.
3. Центрирование арены
Для четкого обзора нам нужен вид арены сверху. Вы можете вращать ее по осям X, Y и Z, удерживая левую/правую кнопку мыши и перемещая курсор. Есть возможность увеличивать и уменьшать масштаб, прокручивая колесико мыши вверх или вниз.
Ниже следует описание настроек, позволяющих обозревать арену сверху. Дважды нажмите на узел дерева сцены Viewpoint — то еть на точку обзора, открыв тем самым данный узел и отобразив его поля. Выберите поле orientation — ориентация и установите значение angle , то есть угол, в 1,58. После чего перейдите к полю position — позиция и укажите значения: x (-0.034), y (2.2365), z (-0.023) .
В результате среда будет выглядеть следующим образом:
4. Добавление препятствий
Добавление препятствий в данном сценарии не обязательно. Я же воспользовался этой возможностью для придания симуляции более реалистичного вида и просто ради интереса 😄.
Вид среды с препятствиями:
5. Создание контроллера робота E-puck
- В меню сначала нажмите Wizards , затем в подменю — New Robot Controller (новый контроллер робота).
- Нажмите Next .
- Выберите язык для программы контроллера. Данный проект написан на С. После этого — Next .
- Укажите имя контроллера. В нашем примере он назван e-puck-move_forward . Затем — Next .
- В завершении нажмите Finish .
Исходный код контроллера:
6. Редактирование программы для контроллера
Контроллер вы можете редактировать из встроенного в Webots текстового редактора или в другой предпочитаемой IDE. Директория контроллера, содержащая программу, находится в [your project directory]/controllers ([директория вашего проекта]/контроллеры).
Ниже представлен исходный код e-puck-move_forward , с которым вы также можете ознакомиться в моем репозитории на GitHub. Скопируйте этот код в свою программу для контроллера:
После этого нажмите Build (сборка) сначала в меню, а затем в подменю. Перед сборкой убедитесь, что программа контроллера открыта в текстовом редакторе Webots.
Обратим внимание на важные особенности программы:
- wb_robot_get_basic_time_step() Webots использует шаг времени симулятора. Базовый шаг — это единица инкрементно увеличиваемого времени, используемая симулятором для отсчёта виртуального времени и выполнения симуляции физики.
- wb_robot_step(time_step) — команда выполняет шаги симуляции и нужна для осуществления шага времени контроллером. Шаг времени контроллера — это инкрементно увеличиваемая единица времени в процессе выполнения контроллером каждой итерации контрольного цикла. Вызов этой команды требуется для синхронизации программы и состояния симулятора. Если симуляция остановится, она вернёт -1 . Если же мы не вызовем эту команду, то робот будет бездействовать. Например, wb_motor_set_velocity(left_motor, MAX_SPEED) только устанавливает значение скорости мотора. Поэтому нам нужно вызвать и начать циклически выполнять команду wb_robot_step(time_step) , чтобы привести робота в движение. Последовательность выполнения программы:
- Сначала мы инициализируем робота и необходимые сопутствующие компоненты вроде обработчика действий моторов.
- Затем мы побуждаем робота двигаться вперед с помощью цикла while .
- После выхода из цикла мы очищаем ресурсы Webots.
Примечание: в этой программе мы выполняем цикл while бесконечно, поэтому никогда не достигнем этапа wb_robot_cleanup .
7. Установка контроллера робота E-puck
Дважды нажмите узел E-puck из отображаемого дерева сцены. Открывается узел и отображаются его поля. Выберите поле Controller (контроллер), нажмите Select (Выбрать) и укажите имя контроллера (имя моего контроллера — e-puck-move_forward ).
8. Запуск симуляции
Для запуска или выключения симуляции в реальном времени нажмите кнопку Play над 3D окном. Итоговая симуляция:
9. Заключительный этап
Не забудьте сохранить ваш мир: нажмите кнопку сохранения или File -> Save World в меню.
Когда вы вносите изменения в мир Webots с намерением его сохранить, то сначала необходимо приостановить симуляцию и вернуть ее в исходное состояние, т.е. счетчик виртуального времени на главной панели инструментов должен показывать 0:00:00:000. В противном случае при каждом сохранении положение каждого 3D объекта может накапливать ошибки. Вследствие этого, модификация мира должна осуществляться в следующем порядке: пауза, возврат в исходное состояние, модификация и сохранение симуляции.
Вы можете просто загрузить данный проект из моего репозитория на GitHub и запустить его в своих Webots. Благодарю за внимание!
Уборка дома отнимает много сил и времени, поэтому производители разработали умный гаджет – робот-пылесос. С ним можно ежедневно убирать квартиру, не прилагая при этом никаких усилий. Еще пару лет назад роботы-пылесосы были доступны не каждому. Сейчас на рынке большой выбор бюджетных моделей. Кроме того, компания Xiaomi создала линейку недорогих роботов-пылесосов с богатым функционалом.

В стать расскажем, как пользоваться роботом-пылесосом, как строить карты уборки и какие могут возникнуть проблемы при эксплуатации.
Как подготовить квартиру к уборке
Для нормальной работы робота-пылесоса Xiaomi нужно правильно подготовить помещение. В первую очередь убрать все провода и посторонние предметы с пола, так как робот может запутаться или повредиться от случайного столкновения.
Необходимо уделить внимание вещам, которые могут пострадать при столкновении с пылесосом. Это могут быть хрупкие напольные вазы, зеркала.
Кроме того, в квартире можно указать нежелательные места. К ним относятся те уголки квартиры, куда, по мнению владельца, не нужно заезжать пылесосу. Например, углы, в которых он может застрять, запутаться в проводах. Для обозначения этих мест используют специальную клеящуюся ленту. При наклеивании создается виртуальная стена, которая не дает роботу выехать за ее пределы.

Как управлять процессом уборки
Управлять роботом-пылесосом Xiaomi можно со смартфона. Для этого есть приложение, в котором можно задавать график уборки, маршрут и контролировать параметры устройства. Приложение интуитивно покажет пользователю, как создать умную карту робота-пылесоса Xiaomi.
Чтобы осуществлять управление и контроль через приложение, необходимо выполнить следующие шаги:
Роботы-пылесосы Xiaomi различаются по наличию функции влажной уборки. В каждой модели есть разделение на полную и частичную уборку.
При полной уборке происходит построение карты, разделяя большое помещение на квадраты. Затем по зигзагообразной траектории производится уборка каждого квадрата по очереди. Каждый квадрат робот-пылесос Xiaomi проходит повторно. После завершения робот возвращается на базу для зарядки. Если док-станцию переместить на другое место, то робот-пылесос вернется на то место, откуда началась уборка.

Возможные трудности
При использовании робота-пылесоса могут возникнуть некоторые трудности. Зачастую они имеют простые решения.
Карта уборки робота-пылесоса Xiaomi
Как настроить карту уборки робота Xiaomi:
- при помощи камеры на корпусе устройства;
- при помощи лазерного датчика дальномера.
В обоих случая настраивания карт, искусственный интеллект анализирует и сохраняет в памяти параметры помещения. С помощью этого пылесос может создать оптимальный план маршрута уборки.

Карта уборки робота-пылесоса Xiaomi может быть настроена как в автоматическом, так и в ручном режиме. И в том, и в другом случае устройство, по сохраненным ранее параметрам помещения, создает маршрут уборки.
Для ручной настройки карты робота Xiaomi в приложении необходимо ввести параметры квартиры. Отмечается место расположения базы. Все это делается в специальном поле. Затем нужно нарисовать виртуальные стены. Устанавливается количество проходов по каждому из квадратов и время уборки. Все изменения сохраняются. Теперь робот-пылесос готов к работе.
Автоматический способ построения карты
При первом запуске робот-пылесос начнет строить карту уборки в автоматическом режиме. При помощи камеры и лазерных датчиков происходит настройка карты робота-пылесоса. Затем, по своему составленному маршруту, техника начнет уборку помещения. Необходимо дождаться завершения процесс. После чего нужно проверить весь ли объем квартиры убрал пылесос. Если что-то осталось не убранным, нужно перезагрузить устройство, чтобы карта уборки помещения построилась заново.
Добавление робота-пылесоса Xiaomi в Homey
Homey — это специальное дополнение, которое позволяет собрать воедино много речевой информации и преобразовать её в голосовые команды. Для того, чтобы добавить робот-пылесос Xiaomi в Homey, нужно выполнить следующее:
При добавление робота-пылесоса в Homey у каждого индивидуальный путь настройки, поэтому необходимо пошагово выполнить инструкцию по установке, которую выдает приложение.

Определение координат
Корректное определение координат для робота — это одно из основных требований, выполнение которого позволит гаджету работать дистанционно. Эта операция имеет несколько шагов:
Если допущена ошибка в выставлении координат, то можно удалить настройки и пройти процедуру заново.
Обозначение границ зон
Добавление комнат

Робот-пылесос Xiaomi при первом запуске может сам распознать все комнаты, и настройка карты помещения произойдет в автоматическом режиме. Также если между комнатами отсутствуют порожки, то робот будет воспринимать помещение как одну комнату. Дождавшись окончания тестовой уборки нужно проверить охват всех комнат. Если что-то пропущено, то нужно сбросить настройки и дождаться считывания помещения заново.

В ходе эксплуатации пользователи робота-пылесоса могут столкнуться с различными проблемами. Одна из них — робот-пылесос не строит карту. Как правило, это происходит из-за неправильного указания месторасположения базы. В приложении нужно с особой точностью задать точку, на которую гаджет будет ориентироваться, потому что начало и конец уборки ориентирован именно на док-станцию. Если ее положение не фиксированное, то робот-пылесос неправильно построит карту.
Как сбросить карту. Как создать несколько карт
В процессе использования возникают ситуации, когда требуется сбросить карту уборки робота-пылесоса. Зачастую это происходит после обновления прошивки или перемещения док-станции. Чтобы произвести сброс карты уборки помещения, нужно:

Покупка робота-пылесоса от Xiaomi позволяет автоматизировать процесс уборки помещения. Но зачастую модели, поставляемые на российский рынок, имеют встроенный пакет озвучивания на английском (а иногда и на китайском) языке. И хотя для управления пылесосом этот параметр не играет ключевой роли, люди все же стремятся установить русскоязычный пакет. В связи с этим они ищут информацию, как прошить робот пылесос Xiaomi, и в итоге сталкиваются с непонятными рекомендациями. Поэтому сегодня мы расскажем о процедуре прошивки простым языком. Приведем пошаговые инструкции, как узнать токен пылесоса Xiaomi и как установить русский язык на робот пылесос Xiaomi. Дополнительно представим популярные варианты озвучивания для модели Mi Robot Vacuum – от классики до вариаций, созданных с использованием фраз из популярных фильмов и мультфильмов.
Как прошить робот пылесос Xiaomi Mi Robot Vacuum: основные шаги
Обращаем внимание, что далее приведенные алгоритмы работают только в отношении пылесосов Сяоми 1 и 2 поколений. Для моделей третьего поколения инструкция может не подойти из-за нового шифрования, внедренного разработчиком этих замечательных устройств.
Важно: Производители не одобряют программного вмешательства в работу бытовой техники, поэтому все далее приведенные действия осуществляются вами на свой страх и риск. Мы не рекомендуем отказываться от стандартного варианта озвучивания пылесосов Сяоми на иностранном языке и вмешиваться в алгоритмы функционирования техники Xiaomi программным способом.

Как узнать токен пылесоса Xiaomi Mi Robot Vacuum: пошаговая инструкция
В стандартном приложении Xiaomi нет опции просмотра токена пылесоса, поэтому узнавать нужные данные придется с помощью стороннего софта. Далее представим самые простые варианты достижения такой цели:
- ОС Android. Нужно скачать усовершенствованную версию приложения Mi Home от разработчика Vevs. С его помощью можно без труда узнать токен и IP-адрес устройства. Если у вас установлена официальная версия приложения от Xiaomi, то ее понадобится удалить, так как нужная информация там попросту не отображается. Перед удалением желательно сохранить резервную копию данных.
- ОС Windows и Mac OS. Нужно скачать эмулятор NoxPlayer с официального сайта и установить его на ПК или другое устройство, функционирующее на базе представленных операционных систем. Затем надо установить вышеупомянутую версию Mi Home от Vevs через интерфейс эмулятора.

Как прошить пылесос Xiaomi Mi Robot Vacuum на русский: основные варианты
Рассмотрим нескольких простых методов прошивки робота-пылесоса Xiaomi. В первом случае прошивка будет производиться с помощью телефона или ранее упомянутого эмулятора. Во втором – исключительно с помощью ПК с установленной системой Windows.
Прошивка беспроводного пылесоса Xiaomi через устройство с ОС Android или iOS
Первый шаг – скачивание и установка программы XVacuum Firmware для Android. Второй шаг – загрузка на устройство языковых пакетов (перечень популярных вариантов представлен в последнем разделе статьи) и их извлечение из архива (в итоге файлы должны иметь расширение .pkg).
При использовании смартфонов, работающих на основе системы IOS, процесс осуществляется аналогично, но с применением другой версии приложения. В начале работы понадобится скачать XVacuum Firmware для iOS и только потом проводить вышеупомянутые манипуляции.

Прошивка робота-пылесоса Xiaomi через ПК с системой Windows
Для начала нужно скачать архив с утилитой WIN-MIROBO, после чего распаковать его в корневой каталог системного диска (по умолчанию диск C). Далее надо открыть файл win-mirobo.ini (через Notepad), вписать туда токен и IP-адрес пылесоса, а затем сохранить документ.
После этого необходимо переместить заранее скачанные голосовые пакеты в папку voicepacks и запустить файл win-mirobo.bat. Если все действия были выполнены корректно, на мониторе появится меню с выбором опций. Нужно выбрать Flash voice package, а затем указать номер требуемого пакета озвучивания. Далее останется дождаться завершения установки и испробовать новый функционал пылесоса.
Важно: во время установки прошивки пылесос должен иметь более 30% заряда и находиться на станции, иначе процесс обновления может закончиться неудачно.

Голосовые пакеты для Xiaomi Mi Robot Vacuum
В этом разделе представлены самые популярные варианты для озвучивания пылесоса Xiaomi. Все названия кликабельны. Нажатие приводит к началу загрузки архива с выбранной озвучкой.
Одновременно на пылесос можно установить только один пакет. Если понадобится сменить озвучивание, то процедуру прошивки придется частично повторить. Хотя во второй раз она займет гораздо меньше времени.
Ниже размещена видеоинструкция по прошивке робота пылесоса Xiaomi Mi Robot Vacuum через ПК (в качестве бонуса присутствует демонстрация фраз из разных пакетов озвучивания).
Программирование для робототехники: на каких языках программируют роботов

Робототехника относится к междисциплинарной области исследований на стыке науки, техники и технологий. Цель исследования - разработать машины, которые не только будут копировать человеческие действия, но и в конечном итоге заменят людей.
В результате робототехника включает в себя проектирование, конструирование и эксплуатацию интеллектуальных машин, называемых роботами. Такие машины используются в различных отраслях промышленности, таких как аэрокосмическая промышленность, здравоохранение, электронная коммерция, освоение космоса и транспорт и т.д.
В 1959 году в США родился первый промышленный робот Unimate, открыв новую эру развития промышленности. Подробнее про первых в истории роботов смотрите здесь: Краткая история робототехники
Сегодня робототехника - одно из самых быстрорастущих направлений исследований. Переходя от сценария чешского писателя, робототехника теперь разделена на несколько областей.

Каковы пять основных областей робототехники
1. Интерфейс оператора
Интерфейс оператора относится к взаимодействию между роботом и его человеком-контроллером. Это механизм связи между человеком и машиной, например, сенсорная панель, джойстик.
2. Подвижность или передвижение
Подвижность или передвижение описывает, как робот перемещается из одного места в другое в заданном пространстве. И это зависит от типа машины. Например, летающие роботы и дроны используют пропеллеры для движения. Точно так же гуманоиды ходят на двух ногах, как люди. Другие варианты мобильности включают плавники и колеса.
3. Манипуляторы
Он относится к конкретному компоненту машины, который делает его идеальным для выполнения определенных задач. Такие части могут включать толкатели, когти, захваты, механические руки и пальцы. Например, промышленные роботы обычно оснащены двухпальцевыми захватами для перемещения предметов.
4. Ощущения и восприятие
Ощущения и восприятие сосредотачиваются на том, как машина идентифицирует вещи в своей среде и реагирует на эти факторы. Благодаря этому полю робот может получить доступ к такой информации, как:
- Где это ;
- Куда идти ;
- Как избежать препятствий.
Например, когда робот встречает препятствие, в каком направлении он должен двигаться. Программисты вводят такие компоненты в машину, чтобы помочь ей принять правильное решение.
5. Программирование
Программирование относится к командам, которые позволяют роботам функционировать в конкретной ситуации. Он включает в себя проектирование и создание исполняемой компьютерной программы для выполнения определенных задач.
Сегодня существует более тысячи языков программирования роботов. Чтобы понять, как работает эта область робототехники, мы должны разобрать этот вопрос более подробно.
Что такое программирование роботов?
Программирование роботов относится к процессу разработки схемы управления тем, как машина взаимодействует с окружающей средой и достигает своих целей. Обычно для этого требуются базовые знания математики и языка программирования. Например, Python сегодня является одним из самых популярных языков программирования роботов.
Помимо разработки машинного обучения, Python также можно использовать для создания пакетов операционной системы роботов. Прежде чем мы исследуем другие языки программирования, давайте сначала рассмотрим программное обеспечение.

Какое программное обеспечение используется для программирования роботов
Операционная система роботов (ROS)
Операционная система роботов - это промежуточное ПО - набор программных фреймворков для разработки программного обеспечения роботов.
Например, проект с открытым исходным кодом ROS-Industrial включает интерфейсы, уникальные для промышленных роботов. К ним относятся промышленные манипуляторы, захваты, датчики и сети устройств.
Важнейшим преимуществом операционной системы робота является способ работы и взаимодействия программного обеспечения. Это позволяет программистам разрабатывать передовое программное обеспечение, не зная, как работает конкретное оборудование.
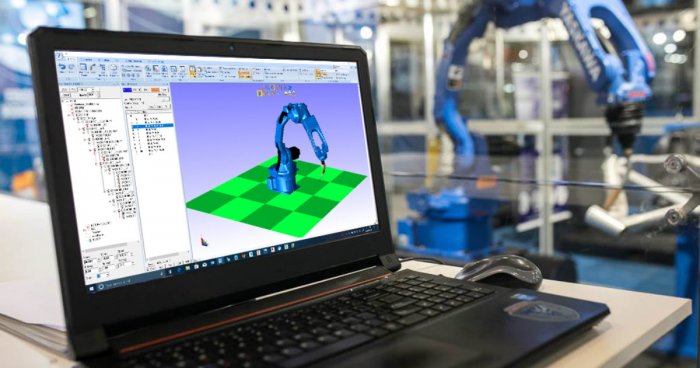
Автономное программирование роботов OLP
При автономном программировании роботизированная ячейка представлена в симуляторе посредством графической 3D-модели .
Используя трехмерное представление роботизированной рабочей ячейки, которое наглядно демонстрирует, как робот движется по запрограммированному пути.
Автономное программирование (OLP) может выполняться с помощью программных платформ, специфичных для непосредственных производителей оборудования (OEM), или с помощью сторонних решений.
OLP также дает опытным и начинающим программистам роботов возможность создавать, тестировать и изменять программу или задачу робота в удобной виртуальной среде программирования на ПК до того, как они будут реализованы на операционном уровне.
Робот запрограммирован на перемещение от точки к точке, однако необходимо планировать путь в соответствии с конкретными элементами, такими как приспособления для удержания деталей. При планировании траектории проще запрограммировать робота для маневрирования вокруг фиксированных точек, поскольку он активирует обнаружение столкновений для предотвращения нарушений движения.
Если несколько роботов работают в непосредственной близости, важно, чтобы они были запрограммированы на работу в команде. Во время автономного процесса программирования функция обнаружения столкновений сигнализирует о потенциальном риске сбоя, позволяя программисту внести необходимые корректировки перед загрузкой программы на рабочий уровень.
Автономное программирование позволяет создать роботизированную задачу еще на этапе создания рабочей ячейки. Этот процесс ускоряет время интеграции, поскольку файлы данных могут быть переданы после того, как рабочая ячейка будет завершена и установлена на операционном уровне.
Гибкость программного обеспечения OLP предлагает множество преимуществ и позволяет лучше сочетать задачи с легким переходом от одной задачи к другой.
Программное обеспечение для управления роботами
Как вы уже догадались, в робототехнике программное обеспечение - это программа для управления роботами. Это набор закодированных команд, которые сообщают машине, какие задачи выполнять автономно.
Некоторые повседневные задачи, которыми управляет программное обеспечение робота, включают цепи обратной связи, фильтрацию данных, определение местоположения и обмен данными.
Программное обеспечение роботов имеет очень частную природу. Таким образом, производители оборудования для роботов обычно должны предоставлять собственное программное обеспечение для работы с машиной.
Как научиться программировать робототехнику?
Вот разбивка языков программирования роботов в порядке их полезности.
Паскаль - это базовый язык, разработанный для поощрения хороших практик программирования. Это потому, что он использует структурированное программирование и структурирование данных.
Этот язык программирования является также основой для нескольких промышленных роботов языков. По этой причине это отличная отправная точка для тех, кто хочет программировать промышленных роботов.
Хотя Паскаль может быть слишком устаревшим для повседневного использования, он может помочь вам познакомиться с другими языками промышленных роботов.
Scratch чрезвычайно популярен среди начинающих робототехников, и на то есть веские причины. Это яык визуального программирования, по сути, включает перетаскивание и соединение блоков.
В результате он идеально подходит для начинающих программистов - пользователей в возрасте от восьми до шестнадцати лет. Кроме того, Scratch - язык, предпочитаемый большинством клубов робототехники и школьных технических кружков.
Большинство опытных робототехников вряд ли напишут промышленных роботов на Scratch. Тем не менее, этот язык дает новичкам удобный способ познакомиться с робототехникой.

3. Языки промышленных роботов
Сегодня почти каждый робот имеет собственный язык программирования роботов.
Как вы уже догадались, это давняя проблема промышленной робототехники. Это означает, что пользователям приходится изучать новый язык каждый раз, когда они используют новый бренд роботов.
Например, роботы Fanuc используют язык Karel, Yaskawa использует INFORM, Kuka - KRL, а ABB имеет свой язык программирования RAPID. Этот список можно продолжить.
Некоторые среды программирования общего назначения, такие как ROS Industrial (Robot Operating System Industrial), начинают предлагать стандартизированные параметры. Однако технические специалисты по-прежнему могут использовать собственный язык программирования.
4. LISP и Пролог
В последнее время все более популярной стала область искусственного интеллекта. В результате различные языки программирования искусственного интеллекта сейчас привлекают больше внимания, чем когда-либо прежде. LISP и Prolog - два таких языка.
LISP - один из первых языков программирования. В результате он стал пионером многих идей в области информатики, таких как автоматическое управление хранением, условные выражения, рекурсия и функции высшего порядка.
Между тем, Prolog был одним из первых языков логического программирования. Помимо доказательства полезности для обработки естественного языка, Prolog также используется для доказательства теорем, экспертных систем и автоматизированного планирования.
Действительно, вы можете программировать искусственный интеллект, используя другие языки из этого списка. Однако LISP и Prolog являются неотъемлемой частью некоторых реализаций искусственного интеллекта.
Также стоит отметить, что робототехника и искусственный интеллект - две разные области, хотя они часто и пересекаются.
5. Язык описания оборудования
Инженеры, создающие низкоуровневую электронику для роботов, используют языки описания оборудования для описания своих прототипов.
Благодаря HDL программисты могут быстро описать схему с помощью слов и символов. Программное обеспечение для разработки может затем преобразовать это текстовое описание в данные конфигурации для реализации.
Самыми популярными языками описания оборудования являются Verilog и VHDL. И они широко используются в программировании PLD (programmable logic device), на русскоям языке - это программируемые логические интегральные схемы (ПЛИС).

Инженеры-робототехники полагаются на MATLAB для анализа данных и разработки систем управления. Помимо обработки данных, некоторые университетские курсы также используют этот язык программирования в исследовательских целях.
Однако инженеры-робототехники используют MATLAB и Simulink для проектирования в различных целях ( а лгоритмы настройки , м оделирование реальных систем ).
Java- это объектно-ориентированный язык программирования общего назначения, основанный на классах. Он предназначен для того, чтобы разработчики приложений могли писать один раз и запускать их где угодно.
Другими словами, код J ava может работать на любой платформе, поддерживающей J ava , без необходимости перекомпиляции. Таким образом, становится возможным использовать один и тот же код на старых машинах.
Язык программирвоания J ava весьма полезен в некоторых аспектах робототехники. Например, это один из основных языков современных систем искусственного интеллекта, таких как AlphaGo и IBM Watson.
Python - один из самых популярных языков программирования благодаря быстрорастущей области машинного обучения. Фактически, IEEE Spectrum назвал его лучшим языком программирования в 2019 году.
Существенным преимуществом этого языка программирования является простота использования. С Python вещи, которые отнимают время в программировании, такие как определение и приведение типов переменных, становятся ненужными.
Python полезен в робототехнике, потому что это один из основных языков программирования в операционной системе для роботов ROS (помимо C ++). Тем не менее, он может стать еще более популярным, поскольку более дружелюбная к роботам электроника, например одноплатные компьютеры Raspberry PI, поддерживает этот язык по умолчанию.
C и C++ - язык программирования номер один в робототехнике.
Некоторые аппаратные библиотеки в робототехнике используют C или C++. Кроме того, эти библиотеки позволяют взаимодействовать с низкоуровневым оборудованием. И они также поддерживают работу в реальном времени.
Сегодня C ++, возможно, более полезен в робототехнике, чем C. Однако последний остается одним из наиболее энергоэффективных языков программирования.
Обратите внимание, что языки C и C++ не так просты в использовании, как Python или MATLAB. Реализация той же функциональности с использованием C не только занимает больше времени, но также требует большего количества строк кода.
Однако робототехника во многом полагается на работу в реальном времени. В результате C и C++ - самые близкие к стандартному языку программирования роботов.

Заключительное слово: какой язык программирования роботов вам следует изучить?
Основываясь на этом посте, вы можете сделать вывод, что изучение Python или C / C++ должно быть первым шагом. Хотя этот вывод может быть правильным, ответ на вопрос не так прост.
Правильный ответ - выучить тот язык программирования, который в настоящее время имеет для вас наибольший смысл. И вот почему.
Вначале вам следует сосредоточиться только на разработке приемлемых практик программирования. Хотя для этого может потребоваться изучение многих языков, вам нужно выбрать только тот, который кажется вам естественным. Такой язык должен позволить вам быстро и легко разрабатывать программы. Однако он также должен соответствовать вашему роботизированному оборудованию.
Для большинства людей этим языком программирования является Python. Его легко освоить, и он мощный - благодаря огромным библиотекам. После Python вы можете изучить языки C и C++ для взаимодействия с драйверами роботизированного оборудования.
При установке mi home на телефон, появляются следующие действия:
- Контроль работы робота-пылесоса из любого места;
- Получение доступа к персональным данным оборудования;
- Отслеживание уровня заряда батареи;
- Просмотр технических характеристик и состояния всех производственных деталей.
Синхронизация с телефоном

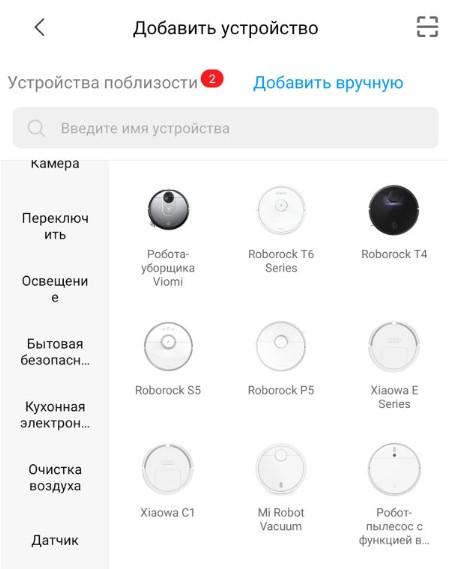
Если имеющаяся модель не отобразилась среди остальной техники даже после перезагрузки пылесоса — поместите объект самостоятельно, вручную. Когда соединение все же состоится, в новом поле укажите название сети Wi-Fi и пароль от него. В конце на главной странице должен возникнуть значок с нужной моделью. Это даст нам знать, что синхронизация прошла успешно.
Как управлять процессом уборки?
Приложение открывается несколько основных функций:
Возможные трудности
При подключении пылесоса к приложению на телефоне мы можем столкнуться с такими нюансами:
Не получается подключиться к Wi-Fi
Если телефон iPhone
Нет возможности войти в свою учетную запись
Иногда неполадки бывают в самом сервере, который не принимает трафик с устройства. В таком случае, установите программу VPN, запустите и выберите Сингапур или Германию. И уже повторно зайдите в приложение mi home
Как настроить робот-пылесос без приложений
- Подключают стационарную конструкцию к сети, убирают лишние поводки в специальное гнездо.
- База располагается так. Вокруг нее отделяют большое количество свободного пространства и ставят робот-пылесос.
- Если вы боитесь, что допустите ошибку при установке, то лампочка на задних контактах будет сообщать об этом мигалками.
- Постоянное свечение обозначает полный заряд батареи и готовность пылесоса к работе.
- Цвет подсветки означает то, насколько заряжен или разряжен прибор. Таким образом, красный — не более двадцати процентов, желтый это половина, а белый свидетельствует о полной шкале энергии.
Как взаимодействовать с док-станцией
Для того, чтобы пылесос всегда был заряжен, необходимо проверять покрытие вай-фай в той зоне, где размещена станция. Избегайте места, которые могут быть сильно освещены солнцем. Так вы обезопасите местонахождение электроприбора.
Также придется очищать нужную поверхность от мелких предметов, кабелей и других препятствий, которые будут мешать роботу-пылесосу во время уборки.
Как настроить робот-пылесос с приложением
Устанавливая приложение, человек сохраняет свое время для других продуктивных дел. Поскольку приложение mi home предназначено для дистанционного управления. Вот несколько пунктов для настройки:
- Установите и загрузите приложение mi home.
- Выберите свой регион. Предпочтительные — Европа, Сингапур, Америка.
- Создайте аккаунт и войдите в него.
- Добавьте свою модель робота-пылесоса в приложение.
- Удерживайте клавишу mi robot. В течение пару секунд дождитесь звукового сигнала. Это демонстрация успешного подключения устройства к mi home.
- На дисплее кликните на свой пылесос и точку доступа Wi-Fi.
- Назначьте стандартное место пребывания техники. Например, спальня.
Теперь вы можете полноценно управлять пылесосом и вносить изменения по желанию.
Инструкция для выбора местоположения

Подбор необходимой локации делается просто. Первым делом откройте приложение mi home и нажмите на значок, отображающий пылесос — высветится схема комнаты. Как и во всех функциях по умолчанию стоит заданная величина. Тут она 25500Х25500. Значение является первоначальным, поэтому соответствует параметрам базы.
Выбираем границы
Голосовое управление
Команды голосовым управление могут быть заданы в системе изначально. Или человек сам может создать нужный сценарий. Владелец оборудования четко и достаточно громко проговаривает команду. Это требуется для того, чтобы устройство правильно выполнило поставленную цель.
По некоторым причинам большинство моделей роботизированных пылесосов не имеют голосового помощника. А вот исключением является Xiaomi, так как финансовая сторона и технические возможности позволили создать персонального помощника — Xiao AI.
Реализация голосового управления Xiaomi:
Подключение робота-пылесоса к телефону с картинками
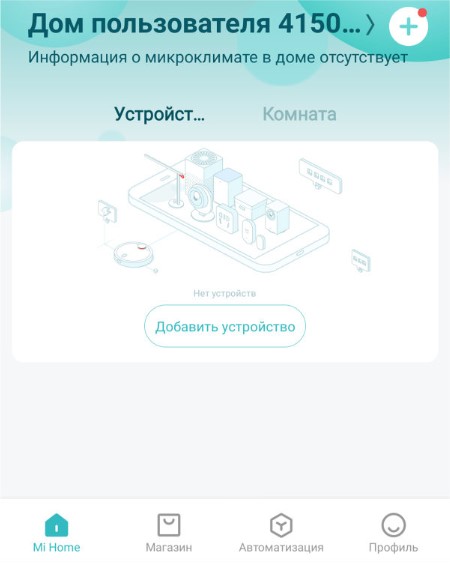
Для подключения Робота-пылесоса к телефону Вам потребуется приложение Mi Home, доступное для скачивания в Play Market и App Store.
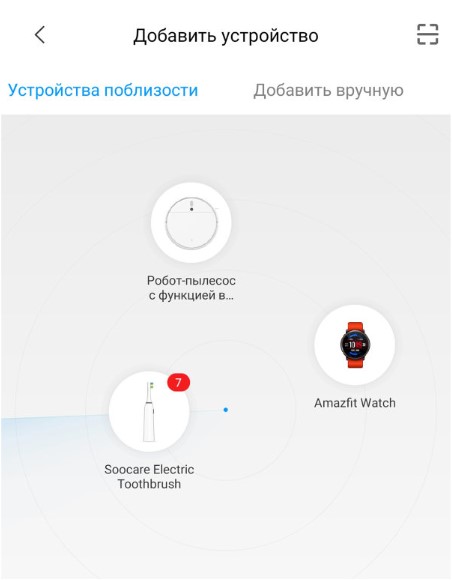
Шаг 2. Для автоматического поиска устройств приложение предложит Вам включить Bluetooth. После этого Вы сможете подключить устройства поблизости. Для подключения нажмите на изображение робота-пылесоса.
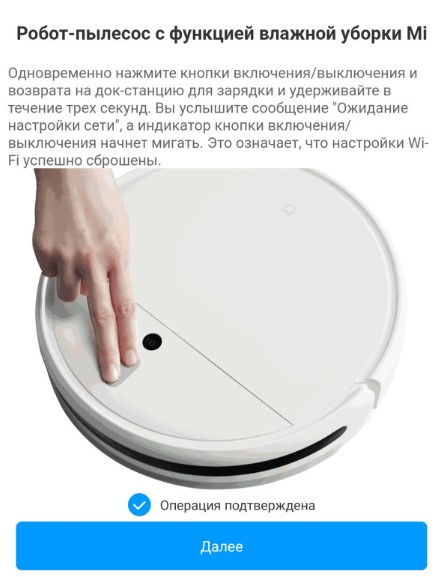
Шаг 3. Приложение попросит Вас сбросить настройки пылесоса. Зажмите две кнопки на корпусе пылесоса, как показано на картинке, и дождитесь голосового уведомления о сбросе настроек.
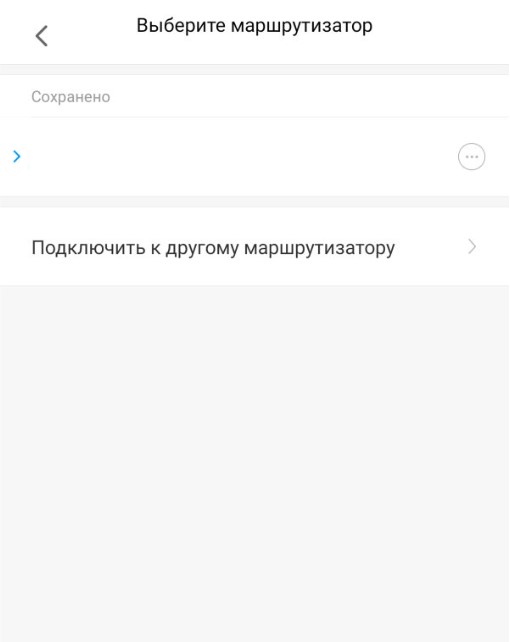
Шаг 4. В следующей вкладке выберите домашнюю сеть Wi-Fi к которой подключен Ваш смартфон. После этого начнется подключение и обновление устройства.
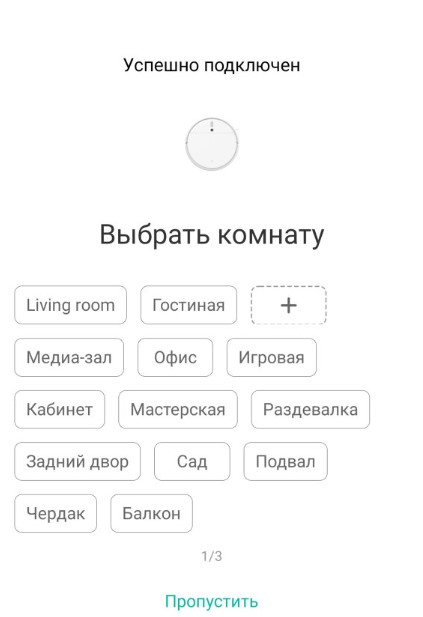
Шаг 5. После успешного подключения устройства Вы можете выбрать его расположение. Расположение устройства при необходимости можно будет изменить в настройках.
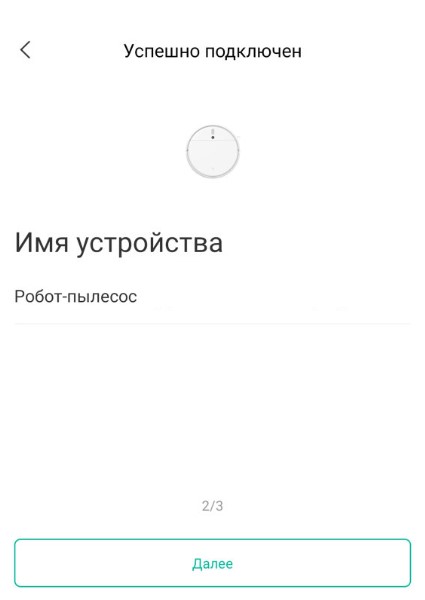
Шаг 6. На следующем шаге Вы можете переименовать устройство. Рекомендуется устанавливать наименования устройств на кириллице (на русском языке).
Шаг 7. Вы можете добавить Mi аккаунты для совместного использования пылесоса.
Функционал
Читайте также: