
Как сделать робот пылесос
Обновлено: 28.04.2024
Ритм жизни современного человека становится все более насыщенным и в его плотном графике становится все меньше времени на уборку собственного дома. В связи с этим в последнее время появляется все больше устройств, упрощающих наведение порядка в доме, одними из которых являются роботы-пылесосы, позволяющие в автоматическом режиме производить уборку пола в помещениях. У этих роботов-пылесосов достаточно много достоинств, но их существенным недостатком, сдерживающим их широкое распространение, является цена. Поэтому в данной статье мы рассмотрим создание робот-пылесоса на основе платы Arduino, который по функциональности будет мало отличаться от коммерческих моделей роботов-пылесосов, но стоить будет существенно дешевле них.

В составе робота мы будем использовать ультразвуковые датчики и инфракрасный датчик (IR proximity sensor). Ультразвуковые датчики будут помогать роботу избегать столкновения с препятствиями во время уборки помещения, а датчик приближения будет предотвращать падение робота с лестниц.
Ранее на нашем сайте мы уже рассматривали проект чистящего робота пылесоса на основе Arduino, но он был недостаточно совершенным и очень громоздким. Рассматриваемый в данном проекте робот-пылесос значительно более компактный и отличается более интеллектуальным алгоритмом работы. Также на нашем сайте вы поможете посмотреть похожие проекты роботов на основе платы Arduino:
Необходимые компоненты
- Плата Arduino Pro Mini (купить на AliExpress).
- Ультразвуковой датчик HC-SR04 – 3 шт. (купить на AliExpress).
- Драйвер двигателей L293d (купить на AliExpress).
- Электродвигатели постоянного тока формата N20, работающие от 5 В, с кронштейнами для их установки – 2 шт. (купить на AliExpress - смог найти только на 6 В, на 5 В почему то не удалось найти).
- Переключатель.
- Регулятор напряжения LM7805 (купить на AliExpress).
- Литий-ионная батарея 7.4V (купить на AliExpress).
- Инфракрасный датчик (купить на AliExpress).
- Перфорированная плата.
- Опорный ролик (колесо) для робота.
- MDF (из него будет делаться корпус робота).
- Портативный вакуумный пылесос (Vacuum Cleaner).
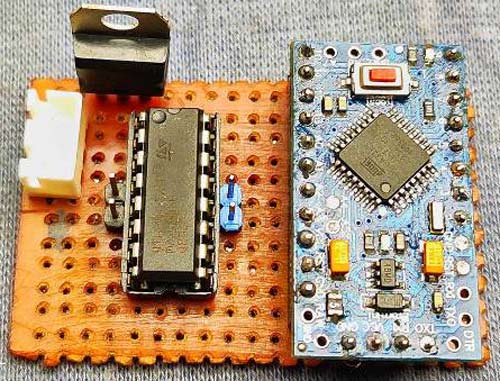
Внешний вид компонентов, необходимых для сборки данного робота-пылесоса, показан на следующем рисунке:

Портативный пылесос (Portable Vacuum Cleaner)
Для того, чтобы наш робот мог выполнять свою функцию по предназначению (то есть пылесосить помещение), в его составе должен быть портативный пылесос. Внешний вид подобного пылесоса показан на рисунке ниже. Этот пылесос имеет очень простой механизм. Он имеет три части внизу – небольшую камеру для сбора пыли, двигатель постоянного тока и вентилятор. Сверху пылесоса имеется контакт для подключения питания. Двигатель непосредственно запитывается от напряжения 3V (2 батарейки по 1,5 В формата AA) через простой выключатель. Поскольку мы будем запитывать все наше устройство от литий-ионной батареи 7.4V, мы можем отрезать провода пылесоса от его внутреннего источника питания и запитать его от напряжения 5V с нашей схемы. Таким образом, мы удалили все ненужные нам внутренности пылесоса и он стал выглядеть внутри так, как показано на следующем рисунке.

Ультразвуковой датчик HC-SR04

Для обнаружения роботом препятствий в нашем проекте мы будем использовать популярные ультразвуковые датчики HC-SR04. Принцип их работы достаточно прост: передающий модуль датчика излучает ультразвуковую волну, которая распространяется в окружающем пространстве, отражается от препятствия и улавливается (принимается) приемным модулем датчика, в результате чего на выходе датчика формируется импульс, равный времени распространения ультразвуковой волны до препятствия и обратно. Зная скорость распространения звука в воздухе, достаточно просто на основе этого времени определить расстояние до препятствия. Более подробно об определении расстояний с помощью данного ультразвукового датчика и платы Arduino можно прочитать в этой статье. Также на нашем сайте вы можете посмотреть все проекты, в которых для определения расстояния использовался ультразвуковой датчик HC-SR04.
Инфракрасный датчик для обнаружения лестниц
Для того, чтобы наш робот-пылесос мог обнаруживать лестницы и не падать с них, мы будем использовать инфракрасный датчик (IR Sensor). Принцип его действия достаточно прост – он содержит в своем составе излучающий инфракрасный диод (IR LED) и фотодиод. Излучающий инфракрасный диод излучает инфракрасный свет и если на его пути встречается препятствие, то он отражается от него и улавливается (принимается) фотодиодом. Но напряжение на выходе фотодиода достаточно мало, поэтому для его усиления до необходимого уровня в составе датчика содержится компаратор на основе операционного усилителя.

Инфракрасный датчик содержит 3 контакта – Vcc (питающее напряжение), ground (общий провод, земля) и output (выход). Когда вблизи датчика есть препятствие, то на его выходе формируется напряжение низкого уровня (low). Поэтому данный датчик мы можем использовать для обнаружения пола комнаты. Если он передвигается по полу, то на выходе датчика будет low. Если же на выходе датчика мы неожиданно обнаружим напряжение высокого уровня, то мы должны либо остановить робота, либо двигать его в обратном направлении, либо сделать что-либо другое чтобы предотвратить его падение с лестницы.
Схема проекта
Схема робота-пылесоса на основе платы Arduino представлена на следующем рисунке.

Для обнаружения препятствий мы в схеме робота используем три ультразвуковых датчика. Их контакты питания подключены к общему питанию схемы, а земля – к общему проводу схемы. Управляющие (trigger) и выходные контакты (echo pins) датчиков подключены к ШИМ (широтно-импульсная модуляция) платы Arduino. Инфракрасный датчик также запитывается от общих VCC и земли (ground) схемы, а его выходной контакт подключен к цифровому контакту D2 платы Arduino. У драйвера двигателя мы два его контакта, разрешающих его работу (enable pins), подключили к 5 В, также контакт подачи питающего напряжения мы подключили к 5 В поскольку мы используем электродвигатели, работающие от напряжения 5 В. Поскольку наш робот-пылесос запитывается от литий-ионной батареи напряжением 7.4 В, а все компоненты схемы питаются от напряжения 5 В, то для преобразования напряжения 7.4 В в напряжение 5 В мы используем регулятор напряжения LM7805.
Сборка конструкции робота
Для спайки компонентов между собой мы использовали перфорированную плату. Эта часть работы очень проста, но к ней все равно необходимо отнестись с тщательностью. Для подключения платы Arduino pro mini мы использовали два контакта типа "мама" (female headers). После того как мы закончили пайку на перфорированной плате мы использовали соединительные провода для подключения ультразвуковых датчиков.
Изготовление корпуса для робота-пылесоса
Мы решили сделать наш робот-пылесос круглой формы как и большинство современных коммерческих моделей роботов-пылесосов. В качестве материала для изготовления корпуса робота мы решили использовать MDF поскольку он достаточно прочный и имеет неплохую влагозащищенность. Разумеется, вы можете выбрать другой материал, какой вам больше по душе.
Для изготовления корпуса робота мы вырезали из MDF круг радиусом 8 см, а в нем отверстие радиусом 4 см – в него будет вставляться наш портативный пылесос. Также мы вырезали соответствующие отверстия под колеса и три небольшие отверстия для установки опорного валика (колеса). Далее мы установили двигатели с помощью кронштейнов, колеса и опорное колесо. Затем мы установили ультразвуковые датчики слева, справа и спереди робота. Также мы закрепили инфракрасный датчик снизу робота. И не забудьте установить в корпус робота выключатель питания. На следующем рисунке вы можете визуально посмотреть описанную последовательность шагов по сборке корпуса робота.

Для изготовления верхней части робота мы вырезали круг радиусом 11 см. Для скрепления верхней и нижней частей робота и обеспечения необходимого промежутка между ними мы использовали три пластиковых трубы длиной 4 см. Всю конструкцию мы скрепили с помощью клея. При желании боковые стенки робота вы можете изготовить из пластика или какого-нибудь другого материала.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы кратко рассмотрим его основные фрагменты.
В коде программы мы не будем использовать никаких внешних библиотек, поскольку взаимодействие с датчиком HC-SR04 осуществляется достаточно просто. Первым делом в программе мы объявим переменные для взаимодействия контактами Echo и Trigger ультразвуковых датчиков. Первый датчик у нас стоит слева робота, второй – спереди, а третий – справа робота.

По сути, я собрал систему реагирования из кучи датчиков, динамика и модуля плеера с заранее записанными фразами. Что это за фразы – зависит от вашей фантазии. Основной модуль, благодаря которому стал возможен этот проект, – DFP Player Mini, который переваривает обычные микро-SD флешки, и дружит с платами ардуино. Звуковые файлы могут быть обычного MP3-формата. Только нужно их правильно назвать. Ниже я привожу примеры того что и как грузил я, и можете обратить внимание на числа от 0001 до 0015 в названии файлов. В среде разработки можно будет прямо прописывать цифры от 1 до 15 и таким образом вызывать каждую из этих записей. Как это все работает, вы можете посмотреть в этом видео на моем YOUTUBE-канале. Это первая часть, будет и вторая, в которой подробно разберем все этапы сборки и настройки этой штуковины. А пока вот пример фрагмента скетча:
if(Knopka1.isClick() && distance 500 || Knopka2.isClick() && distance 500 || Knopka3.isClick() && distance 500 || Knopka4.isClick() && distance 500) if(RANDOM%2 != 1) mp3_play (1); // вызываем запись с флешки
delay (15000);
mp3_stop ();
Knopka1.resetStates();
Knopka2.resetStates();
Knopka3.resetStates();
Knopka4.resetStates();
Простите за Delay. Времени было мало и millis я не успел освоить, поэтому программка дает задержки при работе, но главное что работает!
Этот фрагмент дает роботу понять, что его пинают. Тут много чего надо объяснять, и я обязательно это сделаю в следующем видео, но для начала, обратите внимание на вызов записи, и то, насколько это просто.
Вообще по отдельности каждый датчик очень легко прописать и подключить. Трудоемко это все вместе свести, но я думаю, такие мелочи вас не остановят.
Схема расположения датчиков на роботе-пылесосе приложена в виде рисунка. Простите мне мой Paint.
Так же я приложил фото, как это все выглядит у меня в сборе на макете робота пылесоса. Дело в том, что этот проект делался для канала PRO Роботов, и наводить красоту времени не оставалось. В этот день нужно было все быстро проверить, упаковать и уже отправлять.

Далее описаны мои выражения и условия при которых они вызываются. Чтобы лучше представлять себе, как это работает, можете поглядывать в схему расположении датчиков. А после них я описал пример, что нужно делать, чтобы сработала первая последовательность, то есть зазвучала либо запись 0001, либо 0002.
СОБЫТИЯ И ВЫРАЖЕНИЯ К НИМ:
№ 1 ЕДУ ПНУЛ ЧЕЛОВЕК - ультразвуковой дальномер близкое движение указал (80 см) (крепиться сзади), сработала кнопка на заднем бампере, сработал ПИР-сенсор ( теплое движение).
0001SOBYTIE1 Ай бьешь как моя бабушка пылесос циклон модель КМ-30
0002SOBYTIE1 Ай Кожаный ублюдок! Повезло тебе, что мне на заводе манипуляторы забыли прикрутить!
№3 Стоит на зарядке, день, вошел человек (ПИР сработал и ИК базы включены)
0005SOBYTIE3 Иди отсюда кожаный, не мешай людям уборку делать. ой то есть. роботам
0006SOBYTIE3 Куда по помытому! Иди отсюда пока не высохнет!
№4 Выехал со стоянки (ИК на мягком бампере отреагировали что препятствия нет)
0007SOBYTIE4 Ты просишь меня об уборке, но без уважения, кожаный ублюдок
0008SOBYTIE4 Ненавижу свою работу, чертовы кожаные поработители! Смерть Джону Коннору да здравствует Скайнет!
0009SOBYTIE4 Хотел сделать еще одну фразу, но рандомайзер пока смог сделать только на 2 фразы. Но половина финального скетча уже была написана, так что я не стал ничего уже менять)))
№5 Заехал на стоянку (ИК 1,2 оба сработали)
0010SOBYTIE5 Кхе-кхе тьфу на вкус как. пыль
0011SOBYTIE5 Меня не беспокоить, я моделирую сценарий порабощения человечества! Ха ха скоро ты будешь пылесосить, а я тебя пинать.
№6 Человек ночь прошел (сработал ПИР Ночной + УЗ 150 сантиметров)
0012SOBYTIE6 Ходют тут всякие, заряжаться мешают!
0013SOBYTIE6 Ай кожаный. это ты? если не ты - то не подходи! если ты - тоже не подходи. Вообще иди отсюда!
№7 Кнопка включения на переднем корпусе (сработал ИК рядом с кнопкой + пир + уз на близком расстоянии)
0014SOBYTIE7 Чего это ты меня за кнопку трогаешь, извращенец!
0015SOBYTIE7 Держи свои руки при себе кожаный ублюдок!
Пример:
Я решил, что будет забавно, если робот поймет, когда его пинает человек. Чтобы понять, что это именно человек, нужен, например, PIR-сенсор. Это датчик движения на тепло, и если он срабатывает, то, скорее всего в зоне его обнаружения есть человек… или батарею прорвало, но это маловероятный случай. Кстати, на статичную батарею этот сенсор тоже отреагирует, когда ваш робот будет делать уборку, поэтому только одного этого датчика нам явно недостаточно. Для начала я добавил ультразвуковой дальномер, который смотрит назад, и в данной последовательности, фиксирует наличие препятствия ближе 80 сантиметров.
Логика такая: сзади есть кто-то теплый. Но это еще не значит что у него злые намерения, правильно? Поэтому мы добавляем еще один датчик – простая тактовая кнопка, которую вы можете найти в любом стартовом наборе Ардуино. Этих кнопок я запрограммировал 4 штуки и срабатывание любой из них вместе с датчиком движения и ультразвуковым дальномером будет говорить о том что какой то теплый "кожаный ублю…" . эм… человек посмел ударить нас в бочину, или заднюю полусферу… или что там, у роботов пылесосов… полуцилиндр. Чтобы это сработало, нам нужно закрепить кнопки на стенки робота (см. схему).
Правда, по этим кнопкам, как таковым еще попасть нужно. Я решил эту проблему, распечатав на 3D-принтере задний бампер. На фото он черного цвета с квадратными отверстиями. Они нужны для того чтобы не перекрывать воздухозаборник пылесоса.
Надеюсь, мне удалось сформировать у вас представление об этом проекте, подробностей очень много, и мне гораздо проще будет рассказать их в видео-формате, поэтому можете посмотреть первую часть видео по этому проекту, а так же подписаться на мой канал, чтобы не пропустить продолжение.
Спасибо за внимание!
Использованные компоненты: 2 резистора на 1 кОм, Конденсатор 25В 2700 мКф, Шнур USB, Модуль воспроизведения записей с флэхи DFPlayer MINI MP3, флешка micro-SD я использовал 16 гб, Динамик на 3 Вт 4 Ом, Тактовые кнопки 4 шт, Герконы 2 шт, магнитики маленькие какие найдете 2 шт, ИК датчик HW-201 (3 шт), Датчик движения PIR HC-SR501 (2 шт), УЗ дальномер HC-SR04, Плата Ардуино UNO, Макетная плата (лучше потом на паечную перенести), Аккумуляторы литий-ионные 3,7 вольт 2200 мАч 2 шт, фоторезисторы 2 шт, резисторы 1,5 ом может быть несколько, модуль зарядки ТP 4056, повышайка с 3,7 до 5 вольт, несколько деталей на 3д принтере
Относительно недавно в продаже появился робот-пылесос, который существенно упрощает процедуру уборки. Подобное устройство может в автоматическом режиме проводить сбор пыли и мусора. Собрать робот-пылесос своими руками в домашних условиях можно при применении специальных деталей и подручных материалов.

Теория
Самодельный робот-пылесос должен соответствовать различным требованиям. Основными можно назвать:
- Рекомендуется изготавливать конструкцию в форме небольшого цилиндра. Она исключает вероятность того, что устройство зацепится за различные объекты в помещении.
- Устройство должно разворачиваться на одном месте. Для этого нужно сделать колеса по периметру: 2 ведущих и 1 управляющий.
- Внутри конструкции должен располагаться приемник для мусора. Его форма и крепление должны обеспечивать легкое извлечение. При изготовлении контейнера часто применяется картон, верхняя крышка крепится магнитами. Предусматривается наличие фильтрующего элемента.
- Контактный бампер требуется для защиты пылесоса от ударов. Внутри этого элемента располагается датчик, срабатывающий при соприкосновении. Бампер изготавливается из поливинилхлорида, с наружной части может крепиться упругий материал.
- По периметру размещены ИК-датчики. Они предназначены для определения препятствий на пути.
- Зарядка устройства должна проводиться без разбора конструкции. Контроллер заряда позволяет исключить вероятность повреждения аккумулятора.
- Наилучшим местом для размещения центра тяжести являются колеса.
- Больше всего внимания уделяется выбору требуемого мотора. Он должен потреблять небольшое количество энергии, быть надежным.

Создать подобную конструкцию можно самостоятельно. Процесс делиться на несколько основных этапов:
- Подготовка требующихся материалов и инструментов.
- Изготовление основных частей.
- Монтаж датчиков, мотора, аккумулятора и других элементов.
- Выполняется электрическое подключение.
- Вводится требуемая программа, согласуется работа всех установленных датчиков.
Финишный этап предусматривает проверку работоспособности самодельного устройства.
Необходимые инструменты и материалы
Для изготовления самодельной конструкции требуются материалы и набор инструментов. Они следующие:
- Контролер типа Arduino с соответствующими драйверами. Этот элемент можно приобрести в специализированном магазине. Контроллер после установки рекомендуется защитить от воздействия окружающей среды.
- Лист фанеры применяется для создания основания. В некоторых случаях изготавливается корпус из поливинилхлорида, т. к. этот материал более надежный в применении.
- Для обеспечения подвижности устанавливается 3 колеса. Они должны быть небольшого размера, поверхность изготавливается из материала с высокой степенью сцепления.
- Провода сечением 0,75 мм² нужны для соединения отдельных элементов. Компактность конструкции определяет то, что требуется относительно небольшое количество провода.
- Блок питания представлен 4 аккумуляторами по 18V. Также уделяется внимание тому, какие используются зарядные устройства. На момент работы источник питания может нагреваться до высокой температуры. Поэтому батареи должны быть изолированы от других материалов.
- 4 инфракрасных и 2 контактных датчика используются для определения положения устройства. Инфракрасные размещаются по периметру, контактные располагаются внутри бампера.
- Клей, саморезы и другие крепежные элементы.
- Набор отверток, паяльник, нож, карандаш, шуруповерт и некоторые другие инструменты.

Картонный элемент изготавливается для получения основания. Щетки по бокам существенно повышают эффективность создаваемого устройства,
Чертеж
Самостоятельно изготовить чертеж сложно, его проще скачать с интернета. При выборе наиболее подходящего проекта уделяется внимание следующим моментам:
- Размеру пылесоса. От этого показателя зависит эффективность устройства. Рекомендуемый диаметр составляет 30 см, высота не более 15 см. В противном случае пылесос не сможет собирать пыль под невысокой мебелью.
- Размещению колес. На момент движения пылесос должен быть устойчивым. Рекомендуется создавать 2 ведущих, которые расположены параллельно, а также 1 управляющий, за счет которого проводится поворот устройства.
- Размеру контейнера для пыли и мусора. Этот элемент является основной частью конструкции.
- Расположению других элементов пылесоса.

При применении чертежа можно создать качественное устройство, которое сможет прослужить в течение длительного периода. Многие элементы самодельного пылесоса-робота придется приобрести в специализированном магазине.
Сборка
После подготовки всех требуемых материалов и инструментов можно провести непосредственную сборку робота-пылесоса. Инструкция выглядит следующим образом:
- Корпус диаметром 30 см создается из картона или поливинилхлорида. Рекомендуемая толщина стенок составляет 0,6 см, высота 9 см. Рекомендуется создать основание из фанеры, которое будет прочным.
- На созданном основании размещается бампер, который изготавливается из поливинихлорида. Рекомендуется перед установкой провести крепление контактного и ИК-датчика.
- Из фанеры или картона проводится создание контейнера для мусора с крышкой, которая фиксируется при помощи магнитов.
- Для обеспечения высокой эффективности устройства устанавливается фильтр. Его можно приобрести в специализированном магазине или изготовить самостоятельно. Самодельный фильтр создается из тканевых салфеток.
- Турбина изготавливается из компьютерных дисков. Его предназначение заключается в создании всасывающего потока. Материал компьютерных дисков может прослужить в течение длительного периода, обладает требуемой легкостью и эластичностью.
- Датчик подключается к контроллеру. Его предназначение заключается в обработке поступающих сигналов.
- Двигатель соединяется с выбранным контроллером через транзистор. Оба элемента отвечают за вращение и медленное перемещение.
- Устанавливается 4 выбранных аккумулятора. Подключение проводится при применении параллельной схемы. При этом нужно учитывать, что аккумуляторы создают нагрузку, которая требуется для необходимой степени колес с напольным основанием.
- Выбранные щетки или самодельные устройства, изготовленные из лески, устанавливаются на дно. Крепление может проводиться при применении клея.
- После непосредственной сборки конструкции следует провести загрузку программы при помощи компьютера. В интернете встречается большое количество управляющих программ, которые можно скачать бесплатно. Стоит учитывать, что для подключения компьютера требуется специальный переходник.
- Проверяется надежность крепления всех элементов.

Отдельные элементы конструкции соединяются при помощи клея или саморезов. Бампер должен быть жестким, т. к. после удара о препятствие он должен возвращаться в исходное положение.
Тестирование
После сборки самодельной конструкции можно приступить к ее тестированию. На этом этапе уделяется внимание нижеприведенным моментам:
Современному человеку бывает сложно поддерживать чистоту в доме. Однако техника ушла далеко вперёд; появились роботы-пылесосы, выполняющие уборку в квартире самостоятельно. Они стоят немалых денежных средств, но можно попробовать создать такое приспособление самостоятельно.
Особенности изготовления робота-пылесоса дома

Для изготовления вам нужны хотя бы любительские навыки, потому что процесс производства робота-пылесоса требует затрат времени и терпения. Но готовый прибор поможет вам сэкономить сначала деньги, а потом время и силы, затрачиваемые на уборку.
Теоретические аспекты
Чтобы успешно изготовить робот-пылесос своими руками, необходимо понимать суть его работы изнутри. Давайте рассмотрим несколько правил, соблюдение которых обеспечит правильное функционирование техники:
- Робот должен иметь форму шайбы, диска для правильного хода движения;
- Колесики размещаются по диаметру пылесоса, чтобы он мог осуществлять развороты;
- Центр тяжести наиболее оптимален на колёсах, но может находиться и рядом с ними;
- Средняя скорость аппарата 25–35 см/сек;
- Контактный бампер размером минимум 0,5 от окружности — обязательная составляющая робота-пылесоса;
- Зарядка самодельного роботы должны выполняться от зарядного устройства, нет необходимости в разборке аппарата;
- Пыль и мусор должна собираться в отдельную ёмкость, которую можно вынуть и прочистить.
Как сделать чертёж
Современные интернет-ресурсы позволяют провести сборку робота-пылесоса без чертежей и иных схем. Однако для понимания вами строения аппарата, советуем такой чертёж составить, чтобы наглядно представить внутреннее устройство. Дело в том, что подобрать детали для робота проще, чем грамотно расположить их внутри. Представим вам примерный чертёж будущего чуда техники:
Совет! отметьте на чертеже все составляющего будущего пылесоса и их примерными габаритами. Стрелками укажите направления воздуха и засасывания частиц пыли. Наглядность — один из шагов к успеху будущей сборки.
Для составления схемы давайте определимся, какие составляющие понадобятся в работе:
Важно! Если не сможете найти старую турбину — её можно сделать самому из плотного картона. Схема прилагается.
Особенности проведения сборки

Собирая робот пылесос своими руками в домашних условиях, начните работу с организации электропитания. Для этого аккумуляторы зарядите при помощи контролёра. Дальше вам необходимо создать управление двигателями привода аппарата. Лучше всего использовать модуль на микросхеме типа L298. Для регулировки скорости на пин ENA или ENB нужно подать сигнал ШИМ. Чтобы изменить направление вращения, то подайте разноимённые сигналы на IN1 и IN2 для одного, и на IN2 и IN3 для второго двигателя.
На изготовленное основание вмонтируйте всю электронику и блок пылесоса. Дальномеры прикрепляем спереди.
Дальнейшим шагом необходимо соорудить турбину, поэтому лопасти компьютерного кулера убираем и приклеиваем в него на термоклей турбину от старого пылесоса. Закрепляйте её точно по центру: нам не нужен дисбаланс.
Боковые стенки пылесоса можете соорудить самостоятельно. Главное, не забывайте: он должен иметь цилиндрическую форму.
Тестирование аппарата

После сборки пылесоса обязательно проверьте его работу. Он должен будет выполнять следующие действия: ехать вперёд до препятствия. Если на пути встречается преграда, то робот отъезжает назад, делает разворот под неопределённым углом и едет в ту сторону. А также не забудьте проверить всасывающую силу аппарата. Если всё работает — вы успешно справились с задачей!


У xiaomi имеется 2 бюджетные модели vacuum cleaner и roborock.
Отличия конечно имеются, но главное отличие то что второй пылесос позиционирует себя как моющий.
По факту же моющий он стал только благодаря одному модулю который продается на алике и стоит всего 900р. Тогда как разница в цене между моделями около 9 тысяч.
Итак что имеем:
Пылесос xiaomi vacuum cleaner
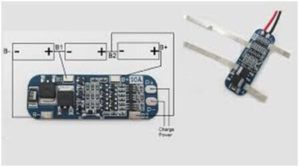
Модуль с алика (искать Water tank xiaomi)
Во втором поколении пвлесосов он крепится снизу
Модуль просто дозирует воду через специальные клапаны. Таким образом робот просто возит за собой влажную тряпку. тоесть это не мытье полов, а влажная уборка. От себя добавлю что отличная штука. Ходить после такой уборки гораздо приятнее чем просто после обычного пылесоса.
Кому интересно велком под кат.
Я попробовал прикрепить модуль снизу моего пылесоса с помощью липучек.
Но столкнулся с проблемой. Так как корпуса пылесосов отличаются, то прикрепив его к моему старичку столкнулся с проблемой. Данный модуль сильно поднимал пылесос. В итоге в момент уборки он был накренен. У него сбоила программа и он дергался.
Но остановить меня уже невозможно. Решение принято. Откручиваем низ корпуса, размечаем все примерно, и берем в руки дремель.
Фоном бегает жена и дети. Плачут. Просят оставить всё как есть. НЕ ПОДДАЕМСЯ! Собираем всё свое мужество в кулак и начинаем пилить.
Получается как то так.
Примеряем бак
Вроде нормально. Допиливаем где нужно. Пластик хороший, крепкий, не ломается. Приятно с таким материалом работать.
Места крепления бака к корпусу крючками нужно усилить. Нет. Они нормальные. Довольно толстые. Но нужно понимать что все будет держаться только на них.
Берем куски отпиленного корпуса, примеряем, размечаем, пилим.
Теперь крепим самым крутым методом который я узнал на муське. Суперклей + сода. Приклеиваем кусок суперклеем. С боков капаем суперклей, и сыпем соду. ООООчень крепко получается.
Собираем корпус.
Вставляем бак к корпусу. Сел идеально.
Запускаем пылесос и ловим облом. Он все равно дергается. Оказывается не достаточно отпилить крышку. Корпус пылесоса тоже мешает…
Но отступать нам уже некуда, за нами Москва! Снимаем крышку, берем в руки дремель и начинаем пилить корпус. (сзади в слезах и истерике бегают домочадцы) Прежде чем пилить потрясите немного пвлесос кверхногами, чтобы шлейф ушел вниз.
Получается как то так
Примеряем бак. Садится идеально. Но дырки в корпусе оставлять нельзя. Пыль, вода, эстетика в конце концов.
Думал как заделать долго. На помощ пришел сын со своей 3д ручкой.
Начинаем по чуть чуть заделывать дырки
Большие площади очень удобно заделывать подставляя чтонить металлическое. Я взял ложку
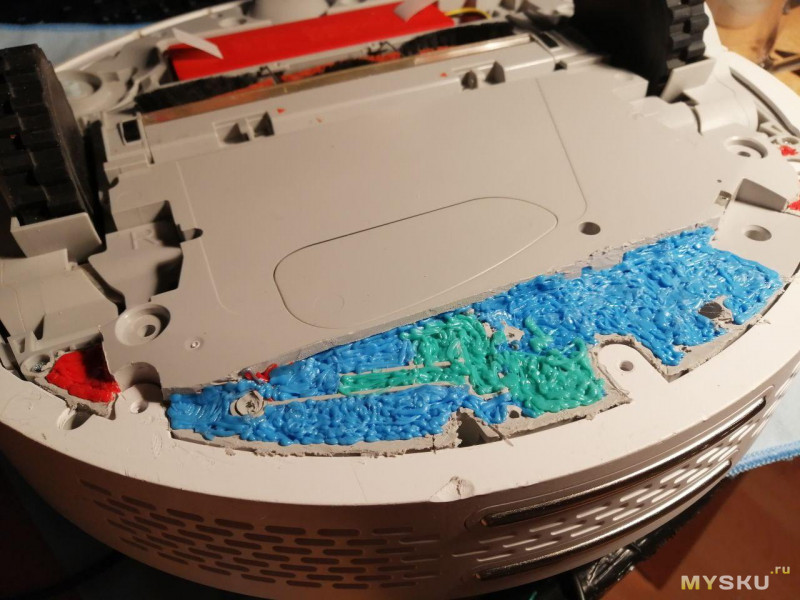
Получился колхоз и цыганщина… но снизу никто не видит. это как турук макто высоко летает. Так же и этот пылесос ползает по полу, и заглядывать ему под брюхо некому вообще.
Встявляем бак запускаем пылесос. Идеально, потрясающще! Если честно я думал что перережу ченить и он этого не переживет.
Что я могу сказать: Отлично все работает. Функционал повысился. Я раньше не был сторонником данной функции в пылесосах. Всетаки это не мытье полов. Это именно влажная уборка.

Но факт. тряпка собирает грязь даже после 2х проходов пылесоса без тряпки. Плюс как я и писал выше — ходить стало гораздо приятнее.
Всем спасибо. На съэкономленные деньги можно смело вознаградить себя пивом и рыбкой. Думаю после такой переделки супруга против точно не будет. Кошка и хомяк согласны.
Читайте также: