
Как сделать робота пылесоса из лего
Обновлено: 06.05.2024
На современном этапе – значительных технических достижений, которые влекут за собой весомые изменения во всех сферах человеческой жизнедеятельности, когда сложные электронные, технические механизмы и объекты окружают человека повсеместно, все большую популярность в дошкольных образовательных учреждениях в работе с детьми приобретает такой вид продуктивной деятельности, как LEGO-конструирование и робототехника.
Во время информационных технологий мы наблюдаем интенсивное использование роботов и в быту, и на производстве. Робототехника сегодня - одна из самых динамично развивающихся областей промышленности Невозможно представить жизнь в современном мире без механических машин, запрограммированных на создание и обработку продуктов питания, сборку автомобилей и т. д.
Образовательная робототехника в детском саду представляет собой новую, актуальную педагогическую технологию,которая находится на стыке перспективных областей знания: механика, электроника, автоматика, конструирование, программирование и технический дизайн.
Обучение детей с использованием робототехнического оборудования – это и обучение в процессе игры и техническое творчество одновременно, что способствует воспитанию активных, увлеченных своим делом детей
Использования LEGO в образовательном процессе с дошкольниками обусловлена тем,что:
LEGO – одна из самых известных и распространённых педагогических систем, широкая использующая трёхмерные модели реального мира и предметно-игровую среду обучения и развития ребёнка.
Игра – важнейший спутник детства. LEGO позволяет детям учиться, играя и обучаться в игре.
В процессе освоения LEGO-конструирования, которое объединяет в себе элементы игры и экспериментирования дошкольники познают основы современной робототехники, что способствует формированию задатков инженерно-технического мышления, развитию технического творчества и формированию научно-технической ориентации у детей.
Это дает возможность проявлять детям инициативу и самостоятельность, способность к целеполаганию и познавательным действиям, что является приоритетным в свете реализации ФГОС ДО и полностью соответствует задачам развивающего обучения.
2. ИСТОРИЯ ИЗУЧАЕМОГО ВОПРОСА
И СУЩЕСТВУЮЩИЕ СПОСОБЫ РЕШЕНИЯ
Ежедневно, каждый из нас сталкивается с мусором. Новые стихийные свалки на улицах появляются с невероятной скоростью. Осенью на тротуарах много опавших листьев, веток, зимой нужно расчищать дорожки от снега.
Для уборки существуют различные уборочные машины, но в парки, на тротуарные дорожки, в детские сады такая большая машина заехать не может. Дворникам тяжело убирать территорию, им нужен помощник в их нелегком труде. Так, зародилась идея придумать робота - уборщика для дворников, а значит, создать проект. Мы придумали робота – уборщика.
В современном мире мы, видим, с какой скоростью развиваются инновационные технологии, нанотехнологии, как заменяют людей роботомашины.
Проблема состоит в том, как донести эту информацию до детей дошкольного возраста, что именно они могут тоже создать робота.
Цель проекта
Задачи проекта
• овладение ребенком моделирующими видами деятельности через конструирование различных моделей.
• дать представление о роботах, которые использует человек.
• расширять представления детей о труде людей инженерных, технических профессий.
• развивать конструкторское мышление, внимание, память, пространственные представления.
• развивать творческий потенциал старших дошкольников посредством конструирования, способствовать обогащению и активизации конструктивного опыта детей.
• поощрять самостоятельность, инициативность, упорство при достижении цели, организованность, умение работать в коллективе, умение работать в паре.
Участники проекта
• воспитанник подготовительной группы Мелких Марк, 6 лет;
• воспитатель – руководитель проекта Грязева Татьяна Васильевна
•Теоретическое исследование: сбор информации о роботах, из разных источников;
• Рисование, лепка по теме;
Применение современных технологий
1. ИКТ - компьютерные технологии;
2. проектная деятельность;
3. здоровьесберегающие технологии;
4. игровые технологии,
Новизна: включение Lego-конструирования в широкий спектр событий детской жизни, а именно разнообразные виды детской деятельности.
• Развитие у детей у старшего дошкольного возраста исследовательских, конструкторских способностей, умения аргументировать свои высказывания, строить простейшие умозаключения.
• Формирование навыков по созданию простых механизмов.
• Развитие инициативности, любознательности и самостоятельности через взаимодействие с взрослыми и сверстниками в решении игровых и познавательных задач.
3. ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ
ПРОЕКТА
Описание конструкции проект
1. Создание корпуса для робота - уборщика
2. Установка L – мотора (Используется 2шт.)
3. Подлючение провода к приёмнику
4. Установка М – мотора (3шт.) и подключение М – мотор к рычагу
5. Сбор щеток и установление на балки
6. Сборка и установка шасси, шестерёнки и ее установка
7. Присоединение гусеничного колеса и заглушу для него
8. Присоединение проводки к аккумуляторному блоку
ВЫВОДЫ ПО ПРОЕКТУ
В результате реализации проекта созданы условия для приобщения детей к техническому творчеству. У детей сформировались представления о робототехнике, о роботах-помощниках. Созданы условия сотрудничества – ребенок, родитель, педагог.
Результаты показали, что поставленная цель и задачи проекта реализованы.

По сути, я собрал систему реагирования из кучи датчиков, динамика и модуля плеера с заранее записанными фразами. Что это за фразы – зависит от вашей фантазии. Основной модуль, благодаря которому стал возможен этот проект, – DFP Player Mini, который переваривает обычные микро-SD флешки, и дружит с платами ардуино. Звуковые файлы могут быть обычного MP3-формата. Только нужно их правильно назвать. Ниже я привожу примеры того что и как грузил я, и можете обратить внимание на числа от 0001 до 0015 в названии файлов. В среде разработки можно будет прямо прописывать цифры от 1 до 15 и таким образом вызывать каждую из этих записей. Как это все работает, вы можете посмотреть в этом видео на моем YOUTUBE-канале. Это первая часть, будет и вторая, в которой подробно разберем все этапы сборки и настройки этой штуковины. А пока вот пример фрагмента скетча:
if(Knopka1.isClick() && distance 500 || Knopka2.isClick() && distance 500 || Knopka3.isClick() && distance 500 || Knopka4.isClick() && distance 500) if(RANDOM%2 != 1) mp3_play (1); // вызываем запись с флешки
delay (15000);
mp3_stop ();
Knopka1.resetStates();
Knopka2.resetStates();
Knopka3.resetStates();
Knopka4.resetStates();
Простите за Delay. Времени было мало и millis я не успел освоить, поэтому программка дает задержки при работе, но главное что работает!
Этот фрагмент дает роботу понять, что его пинают. Тут много чего надо объяснять, и я обязательно это сделаю в следующем видео, но для начала, обратите внимание на вызов записи, и то, насколько это просто.
Вообще по отдельности каждый датчик очень легко прописать и подключить. Трудоемко это все вместе свести, но я думаю, такие мелочи вас не остановят.
Схема расположения датчиков на роботе-пылесосе приложена в виде рисунка. Простите мне мой Paint.
Так же я приложил фото, как это все выглядит у меня в сборе на макете робота пылесоса. Дело в том, что этот проект делался для канала PRO Роботов, и наводить красоту времени не оставалось. В этот день нужно было все быстро проверить, упаковать и уже отправлять.

Далее описаны мои выражения и условия при которых они вызываются. Чтобы лучше представлять себе, как это работает, можете поглядывать в схему расположении датчиков. А после них я описал пример, что нужно делать, чтобы сработала первая последовательность, то есть зазвучала либо запись 0001, либо 0002.
СОБЫТИЯ И ВЫРАЖЕНИЯ К НИМ:
№ 1 ЕДУ ПНУЛ ЧЕЛОВЕК - ультразвуковой дальномер близкое движение указал (80 см) (крепиться сзади), сработала кнопка на заднем бампере, сработал ПИР-сенсор ( теплое движение).
0001SOBYTIE1 Ай бьешь как моя бабушка пылесос циклон модель КМ-30
0002SOBYTIE1 Ай Кожаный ублюдок! Повезло тебе, что мне на заводе манипуляторы забыли прикрутить!
№3 Стоит на зарядке, день, вошел человек (ПИР сработал и ИК базы включены)
0005SOBYTIE3 Иди отсюда кожаный, не мешай людям уборку делать. ой то есть. роботам
0006SOBYTIE3 Куда по помытому! Иди отсюда пока не высохнет!
№4 Выехал со стоянки (ИК на мягком бампере отреагировали что препятствия нет)
0007SOBYTIE4 Ты просишь меня об уборке, но без уважения, кожаный ублюдок
0008SOBYTIE4 Ненавижу свою работу, чертовы кожаные поработители! Смерть Джону Коннору да здравствует Скайнет!
0009SOBYTIE4 Хотел сделать еще одну фразу, но рандомайзер пока смог сделать только на 2 фразы. Но половина финального скетча уже была написана, так что я не стал ничего уже менять)))
№5 Заехал на стоянку (ИК 1,2 оба сработали)
0010SOBYTIE5 Кхе-кхе тьфу на вкус как. пыль
0011SOBYTIE5 Меня не беспокоить, я моделирую сценарий порабощения человечества! Ха ха скоро ты будешь пылесосить, а я тебя пинать.
№6 Человек ночь прошел (сработал ПИР Ночной + УЗ 150 сантиметров)
0012SOBYTIE6 Ходют тут всякие, заряжаться мешают!
0013SOBYTIE6 Ай кожаный. это ты? если не ты - то не подходи! если ты - тоже не подходи. Вообще иди отсюда!
№7 Кнопка включения на переднем корпусе (сработал ИК рядом с кнопкой + пир + уз на близком расстоянии)
0014SOBYTIE7 Чего это ты меня за кнопку трогаешь, извращенец!
0015SOBYTIE7 Держи свои руки при себе кожаный ублюдок!
Пример:
Я решил, что будет забавно, если робот поймет, когда его пинает человек. Чтобы понять, что это именно человек, нужен, например, PIR-сенсор. Это датчик движения на тепло, и если он срабатывает, то, скорее всего в зоне его обнаружения есть человек… или батарею прорвало, но это маловероятный случай. Кстати, на статичную батарею этот сенсор тоже отреагирует, когда ваш робот будет делать уборку, поэтому только одного этого датчика нам явно недостаточно. Для начала я добавил ультразвуковой дальномер, который смотрит назад, и в данной последовательности, фиксирует наличие препятствия ближе 80 сантиметров.
Логика такая: сзади есть кто-то теплый. Но это еще не значит что у него злые намерения, правильно? Поэтому мы добавляем еще один датчик – простая тактовая кнопка, которую вы можете найти в любом стартовом наборе Ардуино. Этих кнопок я запрограммировал 4 штуки и срабатывание любой из них вместе с датчиком движения и ультразвуковым дальномером будет говорить о том что какой то теплый "кожаный ублю…" . эм… человек посмел ударить нас в бочину, или заднюю полусферу… или что там, у роботов пылесосов… полуцилиндр. Чтобы это сработало, нам нужно закрепить кнопки на стенки робота (см. схему).
Правда, по этим кнопкам, как таковым еще попасть нужно. Я решил эту проблему, распечатав на 3D-принтере задний бампер. На фото он черного цвета с квадратными отверстиями. Они нужны для того чтобы не перекрывать воздухозаборник пылесоса.
Надеюсь, мне удалось сформировать у вас представление об этом проекте, подробностей очень много, и мне гораздо проще будет рассказать их в видео-формате, поэтому можете посмотреть первую часть видео по этому проекту, а так же подписаться на мой канал, чтобы не пропустить продолжение.
Спасибо за внимание!
Использованные компоненты: 2 резистора на 1 кОм, Конденсатор 25В 2700 мКф, Шнур USB, Модуль воспроизведения записей с флэхи DFPlayer MINI MP3, флешка micro-SD я использовал 16 гб, Динамик на 3 Вт 4 Ом, Тактовые кнопки 4 шт, Герконы 2 шт, магнитики маленькие какие найдете 2 шт, ИК датчик HW-201 (3 шт), Датчик движения PIR HC-SR501 (2 шт), УЗ дальномер HC-SR04, Плата Ардуино UNO, Макетная плата (лучше потом на паечную перенести), Аккумуляторы литий-ионные 3,7 вольт 2200 мАч 2 шт, фоторезисторы 2 шт, резисторы 1,5 ом может быть несколько, модуль зарядки ТP 4056, повышайка с 3,7 до 5 вольт, несколько деталей на 3д принтере

Роботы-пылесосы постепенно набирают популярность, особенно в больших квартирах, где жильцам некогда тратить время на быструю уборку. Купить пылесос — это только половина дела. Чтобы он прослужил максимально возможный срок и качественно убирал дом, нужно не допускать ошибок при эксплуатации. О самых распространенных мы расскажем в этом материале.
Не читать техническое руководство
Наш народ привык не размышлять, а действовать. Именно поэтому при возникновении каких-либо трудностей к инструкции мы обращаемся в последнюю очередь. Это становится источником различных проблем. Робот-пылесос лишь на первый взгляд относительно простая техника.
Ознакомиться с инструкцией необходимо по нескольким причинам. Во-первых, изучить условия эксплуатации — причиной многих поломок становится обычно сам владелец. Во-вторых, в руководстве описан полный функционал гаджета. Многие люди пользуются роботом по несколько лет и не догадываются, что в нем скрыты некоторые полезные функции. Иногда пользователи не знают даже, что означают индикаторы на главной панели. Не поленитесь потратить 10-15 минут вашего времени.

Выбор неправильного режима уборки
В случае с ручным пылесосом каждый пользователь определяет сам зону уборки, однако роботы полагаются исключительно на свои датчики и предустановленный режим. Если ваш робот-пылесос не предполагает возможность картографирования, то он может выполнять уборку по нескольким типам маршрутов: хаотичный, спиралевидный, по периметру.

Для больших помещений с минимальным количеством препятствий стоит выбрать режим по периметру, после чего переключить в уборку по спирали. Так робот покроет всю площадь помещения за минимально возможное время, не оставляя неубранных участков.
Если в комнатах много мебели с ножками, ваз и других препятствий, то можно выставить хаотичный режим. Каждое определение препятствия будет сопровождаться сменой направления. При наличии множества преград этот режим эффективнее спиралевидного. Также хаотичное движение подойдет и для комнат маленькой площади. В некоторых моделях вы можете комбинировать вышеописанные режимы.

Если загрязнения локальные, например, мелкий мусор рассыпан только под обеденным столом, не пренебрегайте функцией локальной уборки. Робот-пылесос быстро очистит только небольшой участок, как правило 1,5х1,5 метра, и вам не придется запускать режим уборки по всей квартире ради небольшого загрязнения.
Убирать роботом-пылесосом плотные жидкости
Однако после этого ворсовая накладка, валик и засасывающее отверстие сильно забиваются. Вам придется разбирать конструкцию и тщательно вычищать технику. Иначе кетчуп или майонез будут разноситься по квартире дальше.

Вытереть майонез или кетчуп обычной тряпкой с пола займет не больше одной минуты, а на чистку внутренностей пылесоса вы потратите до 30 минут.
Это правило на касается роботов-полотеров. Они используют другой принцип влажной уборки, поэтому с чисткой плотных жидкостей обычно не бывает проблем.
Пренебрежение виртуальными стенами
Пользователи могут ограничивать перемещение робота, выставляя зоны уборки. Сделать это можно как с помощью приложения (если имеется картографирование), так и с помощью специальных магнитных/лазерных лент. Они служат барьером для робота и позволяют ограничить отдельные зоны или комнаты.

Многие владельцы совсем не пользуются этой полезной функцией, из-за чего возникает целый список проблем.
Во-первых, рекомендуем ограничивать детские зоны. Мелкие игрушки вроде деталей конструктора Лего попадут в контейнер с мусором, поэтому вам придется вычищать его вручную. В худшем случае робот из-за игрушек потеряет сцепление с полом и не сможет двигаться дальше.

Во-вторых, всегда ограждайте место, где ваши питомцы ходят в туалет. Робот-пылесос не видит разницы между рассыпанным наполнителем и испражнениями домашних животных, поэтому ваша неосторожность может привести к самым неприятным последствиям. Аналогично оградите зону кормления, чтобы робот не размазывал по полу желе иди другие жидкости.
Также советуем оградить место, где лежат ваши носки или нижнее белье (если вы оставляете их прямо на полу). Роботы-пылесосы не очень дружат с мелкой одеждой и могут просто застрять.
В-третьих, ограничительные ленты помогут оградить спуски с лестниц, если ваша модель не поддерживает распознавание перепадов высоты.
Несвоевременная чистка пылесборника
Один из главных недостатков большинства роботов-пылесосов — это небольшой контейнер для сбора мусора, обычно 0,3-0,5 литра. Этого хватает в среднем на одну-полторы уборки. Типичная ошибка пользователей — запускать в работу робот-пылесос, у которого хотя бы частично наполнен контейнер.

Роботы имеют небольшую силу всасывания, а при забитом контейнере этот параметр падает еще больше. Чистка контейнера обычно занимает не больше 15 минут. Сделайте себе за правило чистить робот-пылесос сразу же после завершения уборки. Это позволит в любое время включить устройство и не беспокоиться, что контейнер забьется прямо в ходе уборки.
Аналогично не забывайте про встроенные фильтры. Они также имеют определенный ресурс. Вся информация о периодичности замены обычно указана в технической документации или на сайте производителя.
Не выполнять обслуживание конструкции
Чистка контейнера не единственная обязанность пользователей — необходимо также следить за состоянием корпуса и движущихся деталей.
Работ пылесос использует для навигации от 6 до 15 датчиков. Пыль и мусор могут прилипать к ним, из-за чего робот начнет хуже ориентироваться в пространстве. Это в особенности касается LDS-датчиков, которые для определения расстояния до цели посылают лазерный луч. Сильные загрязнения также отрицательно скажутся на работе широкоугольной ToF-камеры, которая применяется для анализа местности при плохом освещении.

Также обязательно проверяйте вращающийся валик и колеса робота-пылесоса. На них обычно наматываются волосы или другой мусор. В большинстве моделей вращающаяся щетка и колеса легко демонтируются, поэтому пользователи могут самостоятельно их обслуживать.

Неправильная установка док-станции
Как правило, аккумуляторной батареи робота-пылесоса хватает на одну полную уборку, с учетом, что вы при покупке правильно соотнесли площадь помещений с емкостью АКБ. Если вы хотите, чтобы техника работала полностью автономно, то вам понадобится еще и зарядная станция. Робот сможет автоматически подзаряжаться и продолжать уборку без участия пользователя.
Очень важно правильно установить док-станцию, иначе пылесос будет испытывать сложности с подзарядкой. Базу необходимо размещать как можно ближе к розетке, чтобы исключить лишние провода и удлинители. С трех сторон должно быть свободное пространство хотя бы в 50 сантиметров, иначе из-за препятствий робот не сможет припарковаться.

Поскольку робот-пылесос вне рабочего времени обычно стоит именно на док-станции, то выбрать место лучше не на проходе. Старайтесь подобрать точку в геометрическом центре вашей квартиры, чтобы самые удаленные части равномерно располагались от базы. Однако помните, что зарядную станцию не рекомендуется ставить в ванной, туалете и других комнатах с повышенной влажностью.
Не использовать мобильное приложение
Если вы покупаете робот-пылесос из средней или высокой ценовой категории, то наверняка получаете возможность управления техникой со смартфона. Большинство пользователей пренебрегают установкой приложения и многое теряют.
Фирменный софт предлагает множество полезных функций, которые помогут даже удаленно управлять устройством:
- детальная статистика уборок с указанием времени работы и очищенной площади;
- мониторинг состояния фильтров и щеток;
- просмотр карты помещения с маршрутом робота-пылесоса;
- указание запретных зон;
- отправка оповещений на смартфон, если робот застрял;
- полноценный пульт дистанционного управления и другое.

Фактически, при наличии такого приложения и зарядной станции вам даже не придется подходить к роботу-пылесосу. Достаточно только опустошать контейнер с мусором, если гаджет не делает это самостоятельно.

В закладки
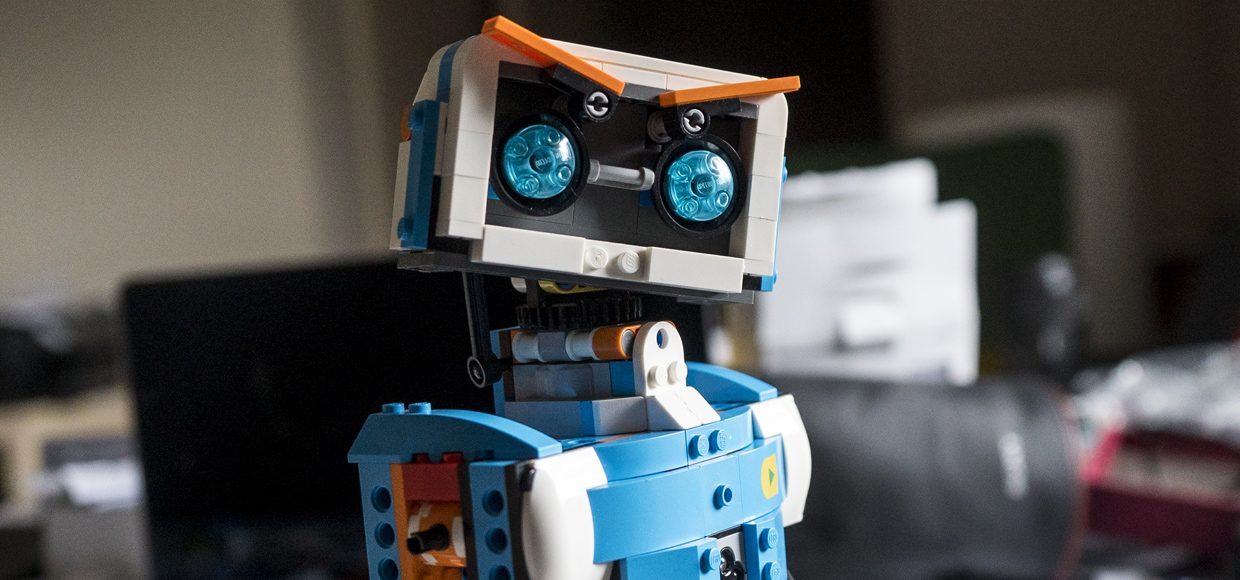
Конструкторы LEGO знакомы каждому. За несколько десятилетий наборы разноцветных пластмассовых деталек стали поистине культовыми: дети с удовольствием собирают из них замки, машины и космические корабли, а взрослые – целые настоящие города.
Сегодня LEGO не только развивает мелкую моторику и фантазию. Новый набор LEGO Boost предлагает в буквальном смысле оживить собранный конструктор, используя смартфон или планшет.
Как это выглядит? Я собрал своего робота и сейчас всё расскажу.
Что такое LEGO Boost

Lego Boost – это развивающий конструктор, состоящий из 847 деталей. из них можно собрать на выбор одну из 5-ти моделей:
1. Робот Верни
2. Кот Фрэнки
3. Гитара 4000
4. Фабрика роботов
5. Вездеход (M.T.R.4)
Основными элементами каждой модели являются 3 детали: это основной механический блок, датчик определения цветов и расстояния и интерактивный двигатель.
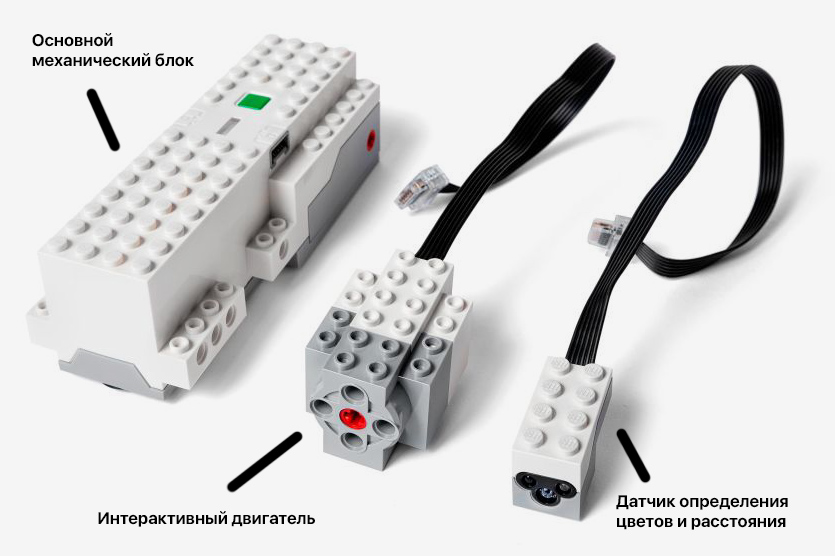
К механическому блоку подключаются два других: датчик цвета и расстояния реагирует на внешние раздражители, помогая игрушке объезжать препятствия или следовать своему сценарию поведения при виде определённого цвета, а интерактивный двигатель оживляет конструктор, вращая гусеницы или колёса (смотря что соберёте).

Про каждую модель можно написать отдельный обзор, но я расскажу кратко о возможностях каждого робота LEGO Boost:
1. Робот Верни. Отличный собеседник и друг
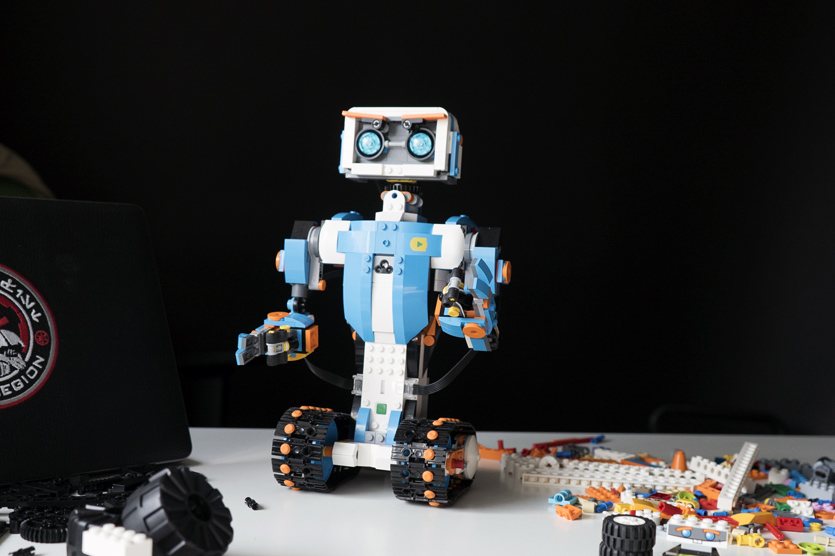
Робот Верни может ездить и крутиться вокруг своей оси, разговаривать, различать цвета и объезжать препятствия. К роботу можно собрать пушку и стрелять по мишени.
С помощью дополнительных аксессуаров робота можно превратить в танцора, диджея, полицейского или хоккеиста. Чтобы разобраться и попробовать все возможности Верни уйдет не один час.
Верни умеет выражать эмоции с помощью подвижных бровей: удивление, злость и радость. Это просто нужно видеть, чтобы оценить как удивительно точно игрушке удаётся радоваться или грустить при помощи всего лишь нескольких двигающихся деталек.
Вот короткое видео, в котором робот Верни ведет себя неприлично:
Нет, пиццу не принесет. Может быть, это в следующем поколении LEGO Boost пофиксят :)
2. Киберкот Френки. Идеальный питомец без шерсти и неприятных запахов
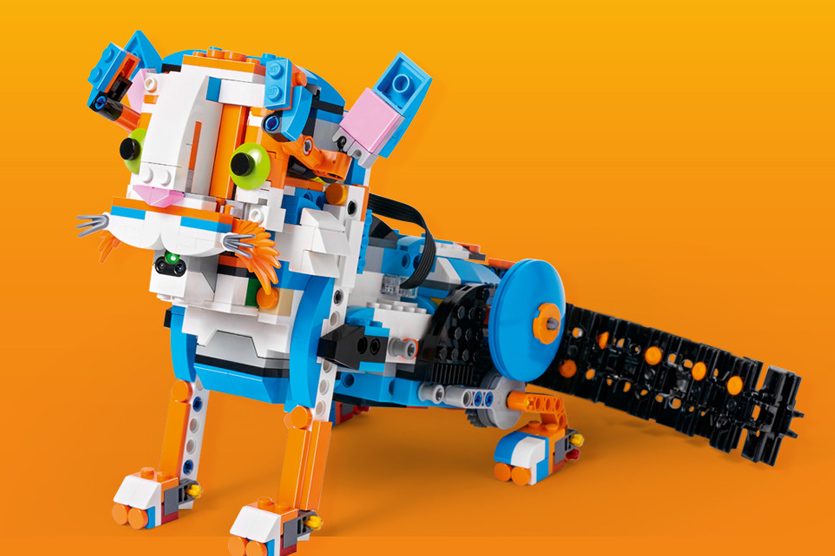
Киберкот по имени Френки не умеет передвигаться сам, зато может вставать на задние лапы, двигать ушами и вилять хвостом. Френки можно погладить, и он отзовётся довольным мурлыканием, а можно заставить его сыграть на губной гармошке, причём мелодия зависит от цвета, который нужно показать киберкоту.
У Френки тоже есть мимика, правда брови ему нужно двигать руками. Интерактивные элементы заняты в вышеописанных процессах виляния хвостом и вставанием на задние лапы.
Да, мы всё ещё говорим про конструктор LEGO.
3. Гитара 4000. Играет как настоящая
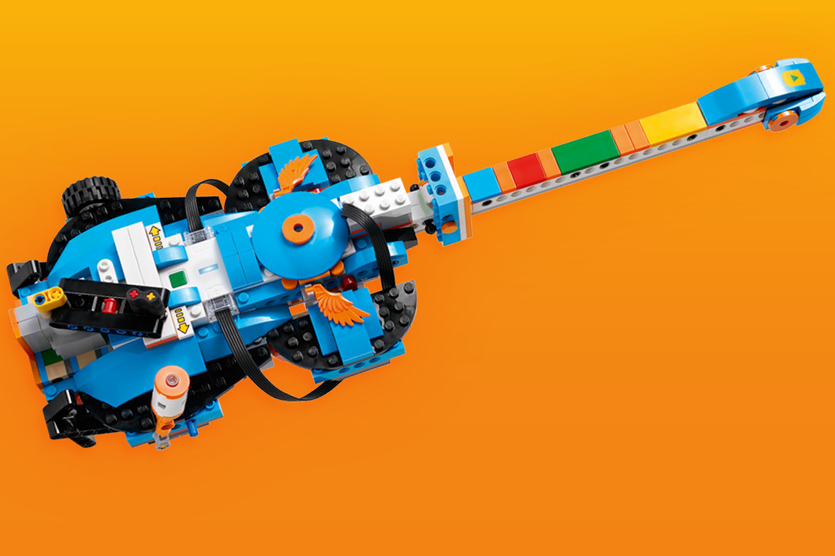
Кстати, эта модель может проигрывать не только гитарные звуки, но и любые другие. Так что почему бы не использовать её в качестве сэмпл-машины, чтобы почувствовать себя настоящим диджеем?
4. Фабрика роботов. Для создания своей армии Терминаторов

Это самая сложная модель из всех пяти, но и самая крутая. После сборки фабрика может сама собирать небольших роботов из кубиков LEGO.
Натурально, весь процесс автоматический. Выглядит завораживающе, но лучше всего это может передать видео.
Краткий гайд по созданию армии роботов:
Я жалею, что сначала собрал робота Верни. Надо было собирать вот эту фабрику, чтобы завалить видеороликами, какой LEGO Boost крутой конструктор, весь инстаграм.
5. Вездеход (M.T.R.4). Проедет по любому ковру

Тяжёлая машина на гусеничном ходу с большими колёсами с лёгкостью проедет по заданному маршруту, объезжая препятствия. На вездеход можно собрать дополнительные аксессуары: пушку, ковш, катапульту и даже строительные конусы, которые игрушка будет аккуратно объезжать.
Лучше всего один раз увидеть, как это происходит:
По схожему принципу работают и другие аксессуары вместе с датчиком движения. Если нет доверия датчикам, можно перейти в режим ручного управления: на экране iPhone или iPad появятся виртуальные джойстики, с помощью которых можно управлять движением вездехода и работой ковша, катапульты или пушки.
Как программировать конструктор?
Приложение LEGO Boost напоминает игру, где каждый уровень помогает освоить новые навыки взаимодействия с конструктором. В самом начале можно увидеть всех роботов и выбрать того, кого хочется собрать.
Для программирования готового робота не нужно уметь даже читать и писать: все команды выглядят как разноцветные блоки, которые нужно просто перетащить на временную шкалу в желаемом порядке.

Конструктор LEGO Boost способен воспринимать и интерактивные команды: можно помахать перед роботом рукой, произнести кодовое слово или прикоснуться, чтобы начал выполняться заранее заданный алгоритм. При составлении алгоритмов действий доступны целые циклы, что уже приближает управление игрушкой к настоящему программированию.
Сложно собрать своего робота?

Для взрослого человека сборка любой модели LEGO Boost займёт 2-3 часа. Для ребенка же весь процесс растянется на несколько дней, особенно если чаду еще нет 10-ти лет.
Лично я справился с роботом Верни за 4 часа. И даже без помощи взрослых!
После сборки игрушка получается прочная, можно даже уронить со стола без опаски, что конструкция разлетится на мелкие куски. Правда бить роботом об пол со всего размаху или топтаться по нему ногами я не рекомендую. Это же всё-таки LEGO.
Важно помнить, что основной механический блок работает от 6-ти батареек формата ААА, которых нет в комплекте. Нужно прикупить отдельно.

LEGO Boost стоит всего 9 990 руб., но при этом развивает абстрактное мышление, тренирует коммуникабельность детей, собирающих его вместе, дает базовые навыки профессии программиста, которая становится все более актуальной.
А главное, процесс сборки конструкторов LEGO – это всегда весело, как детям так и взрослым.
В закладки

RoboticsUA Схемы роботов из конструкторов schedule Добавлено: 21.05.2013 в 15:06 link Теги: DIY nxt lego-робот
Конструкторы Lego являются очень привлекательными для многих детей. FIRST (For Inspiration and Recognition of Science and Technology) создал программу для маленьких детей, которые могут создавать роботов из Lego. Работая в команде, дети создают робота из этого комплекта для выполнения простых ежедневных задач. В этой инструкции мы научим вас, как создать робота из комплекта NXT Mindstorm. Мы расскажем вам, как написать и запустить программу для того, чтобы робот двигался вперед и назад.
Набор NXT Lego стоит приблизительно $100.
Для выполнения задания вам понадобится от 30 минут до 1:30 мин.
*Внимание: блоки Lego очень миниатюрные и маленькие дети могут их легко проглотить!*

Шаг 1. Комплект:
После приобретения и распаковки комплекта NXT Lego вы найдете следующие детали, изображенные на фотографии:

элемент 1 – руки
элемент 2 – изгибы в форме L
элемент 3 – большие зубчатые передачи
элемент 4 – колеса
элемент 5 – NXT блок
элемент 6 – маленькие черные сцепки
элемент 7 – большие черные сцепки
элемент 8 – маленькие черные сцепки
элемент 9 – небольшие светло-серые сцепки
элемент 10 – большие светло-серые сцепки
элемент 11 – голубые сцепки
элемент 12 – темно-серые сцепки
элемент 13 – колпачки
элемент 14 – шасси
Возьмите одну из частей руки, две из небольших серых сцепок и четыре больших черных сцепки, как показано в верхней части фото. Поместите две серые сцепки в последние два отверстия на длинной стороне руки. Серые сцепки должны быть в четном количестве по обе стороны от отверстия. Поместите четыре черных сцепки на концах серых сцепок со стороной короны ближе к руке. Готовое изделие будет выглядеть как нижняя половина фото.

Шаг 3. Шасси. Часть 1:
Возьмите две оси NXT, большую серую и две черных сцепки. Правильные части отображаются в верхнем фото. Подключите две черных сцепки к концу серой части. Это показано в верхней половине второго фото. Концы черных сцепок должны быть размещены через середину одного отверстия из трех на оси рядом с оранжевым кругом. Готовый продукт для третьего шага будет выглядеть в нижней половине второго фото.


Шаг 4. Шасси. Часть 2:

Возьмите готовые детали из шагов № 2 и 3. Переверните конструкцию от третьего шага так, чтобы часть, которую вы вставили, была на дне и пустые отверстия рядом с большим кругом находились на самом верху. Черные кроны будут идти в два задних отверстия. Выполните это для обеих сторон конструкции с шага 2. Готовое изделие будет выглядеть как на фото выше.
Шаг 5. Ось колеса. Часть 1:
Возьмите две L-образные части с пятью отверстиями и самые длинные темно-серые сцепки, как показано в верхней части фото. Поместите длинную сторону темно-серой сцепки через первое отверстие на короткой стороне изгиба. Это будет выглядеть как нижняя половина фото. Протолкните темно-серый кусок на всю длину конструкции.

Шаг 6. Ось колеса. Часть 2:
Возьмите готовую конструкцию, начиная с шага 5, а также большие серые зубчатые передачи, как показано в верхней части фото. Придерживайтесь длинного конца большого темно-серого куска через центральное отверстие в передаче. Передача должна быть на той же стороне моста, как и L-образный кусок. Конечный продукт этого шага должен выглядеть как нижняя половина фото.

Шаг 7. Установка оси на колеса. Часть 1:

Возьмите готовую конструкцию с шага 6 и колеса. Вставьте готовый кусок из шага 6 в центральное отверстие в колесе. Шина должна быть на той же стороне, где находится передача и L-образная деталь. Конечный продукт должен выглядеть как на фото выше.
Шаг 8. Установка оси на колеса. Часть 2:
Возьмите серые колпачки для шин или желтые. Они являются взаимозаменяемыми. Вставьте их на конце темно-серой части, которая торчит через поперечное отверстие в шине, начиная с шага 7. Готовое изделие будет выглядеть как на правой половине фото.

Возьмите готовое шасси из шага 4. Далее возьмите маленькие синие сцепки (смотрите фото в шаге 1). Поместите две синих штуки в третьем отверстии рядом с оранжевым кругом на шасси. В этой группе из трех отверстий, голубые сцепки будут находиться в отверстии, удаленном от оранжевого круга. По одному синему элементу с каждой стороны шасси. Конечный продукт будет выглядеть как на фотографии.

Шаг 10. Создания оси:
Возьмите небольшую серую зубчатую передачу, небольшие черные сцепки и готовую конструкцию с шага 9, как показано в верхней части фото выше. Вставьте черные соединения через один конец небольшой серой передачи. Возьмите эти две части и вставьте другой конец черной сцепки в одном из поперечных отверстий в оранжевых кругах на шасси. Повторите это с другой сцепкой. Готовое изделие показано в нижней части фото.

Шаг 11. Соединить провода:
Возьмите готовые продукты из шагов 10 и 8. Возьмите одно из колес, которое прикреплено к L-образному объекту. Подключите длинную сторону L-образного объекта к синим и черным сцепкам из шага 10.Синяя часть будет подключаться к крестовому отверстию на L-образному объекту, а черные сцепки будут проходить через отверстие рядом с крестом. Готовое изделие будет выглядеть как на фотографии. Повторите эти действия для других колес. Небольшое устройство, подключенное к оранжевому кругу, будет соединяться с большим устройством, подключенным к колесу. После завершения этого шага, тело робота завершено.

Шаг 12. Подготовьте NXT блок:
Возьмите блок NXT и четыре маленьких черных сцепки. Положите блок на сторону так, как показано на левой части фото. Возьмите черные сцепки и разместите их в первом и третьем отверстиях, которые находятся в горизонтальной линии от вас, как это находится в левой части рисунка. Готовое изделие должно выглядеть как в правой части фото.

Шаг 13. Подготовка робота для блока:
Возьмите готовую конструкцию с шага 11. Далее возьмите четыре маленьких черных сцепки. Давайте предположим, что рука робота находится на передней части, а колеса на задней. Найдите группу из трех отверстий в передней части бота. Они расположены в верхней части фото. Разместите две из четырех черных сцепок в задней чести с двумя внешними отверстиями. Готовое изделие будет выглядеть, как нижняя половина фото.

Шаг 14. Прикрепите блок к роботу. Часть 1:
Возьмите блок NXT, оставшиеся две руки и готовую конструкцию с шага 13. Установите блок на верхней части бота. Убедитесь, что черные сцепки находятся на той же половине бота. Этот комплекс мер должен выглядеть как на верхней половине фото. Возьмите одну из рук и подключите короткую сторону руки на шасси, а длинную сторону руки на блок NXT. На короткой стороне руки сцепки должны пройти через два отверстия, которые не имеют поперечных отверстий. На длинной стороне сцепки должны быть помещены в третьем и пятом отверстии с крестовым отверстием в верхней части. Готовое изделие должно выглядеть, как на нижней половине фото.

Шаг 15. Прикрепите блок к роботу. Часть 2:
Для того, чтобы перейти к программированию, блок должен быть подключен к команде. Переверните бота так, что бы он находился на его задней части с передней стороной вверх. Это должно выглядеть, как в левой части фото. Обратите внимание на порты на блоке. Они находятся там, где кабель будет подключен к боту. Возьмите один из кабелей и разместите один из разъемов к порту "А". Подключите другой конец кабеля к порту на правой стороне передней части бота. Возьмите другой кабель. Разместите один из разъемов к порту "C". Подключите другой конец кабеля к порту на левой стороне передней части бота. Готовое изделие будет выглядеть, как в правой части фото.

Шаг 16. Центр управления блоками:
Шаг 17. Откройте новую программу:
Сначала откройте BricxCC. Эта программа попросит вас подключиться к роботу. Возьмите USB-кабель, поставляемый в комплекте, и подключите один конец к порту USB на вашем компьютере, а другой конец подключите к блоку. Включите робота, нажав на оранжевую кнопку на блоке и нажмите кнопку OK на экране компьютера. BricxCC должны соединяться с роботом автоматически. Чтобы начать новую программу выберите "Создать файл" в главном меню.
Шаг 18. Назовите программу:
Есть разные вещи, на которые можно запрограммировать робота. Мы охватываем основы робота двигаться вперед и назад. Чтобы запрограммировать NXT Lego робота, мы должны будем ввести коды в Next Byte Codes (NBC). Эта программа будет изменена на NBC в двоичном коде BricxCC, который робот сумеет прочитать. Начнем с названия кода. В примере автор называет его "основной задачей ()". Далее вам нужно будет открыть программу для кодирования. Для этого мы вводим
Шаг 19. Двигая робота вперед:
Сначала мы начнем с получения робота двигаться вперед. BricxCC имеет некоторые уже написанные программы, которые помогут нам здесь. OnFwd (х, у) – уже написанная программа, которая будет двигать колеса робота вперед. Обратите внимание, что после того, как вы отправите команду, у вас будут два входа. Х относится к двигателю, на который будет отправлена команда. Для двигателей х будет OUT_A; для двигателя C, X будет OUT_C.У указывает на процент, который вы хотите использовать для движения и перемещения. В следующей строке будет написано о том, как долго вы хотите заставить робота двигаться (в миллисекундах). Команда для этого - Wait (z). Таким образом, если мы хотим, чтобы робот перемещался в течение 5 секунд, мы должны выбрать вход 5000. Затем нужно включить двигатель. Это команда Off (х). Напишите этот код дважды для обоих двигателей на отдельных строках. После выключения двигателей введите Continue (z). Этот вход будет закрыт на определенное количество времени, прежде чем блок прочитает следующую строку кода. Для того, чтобы программа вывела этот код, разместите его после каждой строки. Если программа не будет работать должным образом, блок будет перегружен.
Шаг 20. Двигая робота назад:
Далее мы будем двигать робота назад. По сути вещей, ему нужно идти в обратном направлении от команды OnRev (х, у), используя такие же входы, как в предыдущем шаге. Чтобы было легче для нас, мы можем начать с обоих двигателей одновременно. Для включения обоих двигателей в то же самое время, нужно написать OUT_AC в месте с входом х. Для мощности мы оставим его на 100%. Следующая строка кода будет время работы. Поставьте снова 5 секунд. Команда такая же, как отмечалось ранее. Команда Wait (5000) – для двигателей и для перемещения колес на 5 секунд. Когда робот сделал движение, двигатель должен быть включен. Мы можем объединить несколько шагов, которые были использованы в шаге 18, чтобы включить двигатель с помощью того же контекста, который был использован ранее в этом шаге. Off (OUT_AC).
Шаг 21. Завершите программу:

Чтобы завершить программу, вы должны её закрыть. Всё, что нужно сделать для этого, это нажать кнопку "войти" или "возвращение", чтобы показать, что нет больше кода и ввести> ключ. Готовый код будет выглядеть как на фото выше. На фото имеются комментарии относительно того, что робот будет делать в каждом разделе кода, но мы ничего не указываем по поводу этого в инструкциях.
Шаг 22. Управляя программой:
Вы уже построили робота и создали программу, которая позволит роботу двигаться. Теперь все, что вам нужно сделать, это заставить робота двигаться. Сначала нужно составить программу так, чтобы её можно было прочитать блоком. На главном экране BricxCC есть группа из четырех кнопок и меню. Самая дальняя левая кнопка будет компилировать программу, вторая слева будет скачивать и записывать бинарные программы для блока, выходное меню должно показать название вашей программы, вторая справа кнопка – для запуска, самая дальняя – кнопка остановки. Предполагая, что не было никаких ошибок в программе, нажмите вторую слева кнопку. Это позволит загрузить программу на блок. Если есть ошибки, вы будете уведомлены о них. После того, как загрузка будет завершена, нажмите кнопку вторую справа или "выполнить". Это позволит запустить программу из блока.
Шаг 23. Заключение:
Поздравляем, вы закончили! Не забудьте проверить проводку, чтобы убедиться, что кабели подключены к соответствующим портам. Если нет ошибок в программе, убедитесь, что вы написали все правильно (смотрите шаг 21). Если все пойдет по плану, вы построили Lego NXT робота и написали программу, которая будет двигать ботом. Если код был написан правильно, робот будет двигаться вперед в течение пяти секунд, затем подождет еще пять секунд прежде, чем идти в обратном направлении в течение пяти секунд. Если направление должно быть изменено, больше или меньше времени может быть добавлено. Если направление должно быть изменено, чтобы пойти направо или налево, только один из двигателей должен быть включен в течение определенного количества времени. Теперь вы знаете, как изменить код для изменения направления, а также строки.
Читайте также: