
Почему робот пылесос ездит по диагонали
Обновлено: 05.05.2024
Неисправность робота-пылесоса может выбить из привычной колеи людей, которые привыкли к его бесшумной и тщательной уборке. Ведь это незаменимый помощник в доме, где жильцы не хотят тратить своё время на ежедневную уборку и мытьё полов. Разберёмся в основных причинах поломки, когда устройство крутится на месте, не двигаясь по периметру комнаты.
Робот-пылесос ездит по кругу: что делать?
Круговое вращение автоматического пылесоса указывает на поломку одного колеса. В этом случае оно полностью обездвижено или прокручивается, не давая пылесосу работать исправно. Причин может быть несколько, главное — определить точно, в чём состоит проблема, чтобы решить этот вопрос и снова наслаждаться качественной уборкой помещения.
Большой процент поломок связан с засорением отсеков прибора. Регулярно устраняйте этот фактор, чтобы быть уверенными в работоспособности робота.
Распространённые причины поломки
Первой и самой частой причиной считается засор. Как уже было сказано, мусор и волосы, попадают в ходовую часть, наматываются и блокируют работу колёс. В результате крутится только одно колесо, вращая пылесос на одном месте.

Второй распространённой причиной считается поломка редуктора. Именно он приводит в действие ходовую часть бытового прибора, заставляя его двигаться. Потребуется диагностика и замена испорченных деталей.
Ещё одна неявная причина неисправности – выход из строя электронной части. Она состоит из нескольких частей:
- разъём подключения к плате управления с проводками;
- двигатель со схемой управления;
- микровыключатель.
Каждый из этих элементов может прийти в негодность. Требуется тщательная диагностика в сервисном центре.
Как решить проблему?
Если устройство начало двигаться по кругу и перестало выполнять наложенные на него функции, нужно предпринимать экстренные меры. В первую очередь — разобрать отсек редуктора. Чаще всего там скапливается огромное количество мусора, несмотря на герметичность. Вычистив его, нужно проверить работоспособность пылесоса. Обычно колёса начинают крутиться нормально.
Если это не помогло, следуем в сервисный центр, где мастера проведут качественную и полную диагностику прибора. Так можно выявить неполадки в электросистеме устройства и устранить их путём частичной замены важных элементов механизма. Однако делать это советуют у квалифицированных специалистов, чтобы не навредить роботу-пылесосу ещё больше.

Робот пылесос уже давным-давно не относится к каким-то инновациям и для многих стал привычным атрибутом домашней бытовой техники.
Удобно, когда вместо тебя кто-то без напоминаний и скандалов убирает от мусора квартиру.
В современных дизайн проектах иногда даже упоминается обязательное требование доступности уборки при помощи робот-пылесосов!
Только не забывайте, что в первую очередь это устройство для ПОДДЕРЖАНИЯ чистоты, и его наличие в квартире никоим образом не отменяет необходимость генеральной уборки.


У вас конечно исчезнет, так называемый накопительный мусор, но забыть про швабру все равно не получится.
В данной статье мы рассмотрим, чем хорошие модели должны отличаться от не очень хороших, и на каких параметрах в первую очередь стоит делать акцент при покупке.

Какого производителя выбрать?
На самом деле нет. Здесь действует универсальное правило, которое применимо и к другим сферам нашей жизни.

Потому что робот пылесос в первую очередь должен быть РОБОТОМ. Яркий пример – продукция компании IRobot.
Вот типичные отзывы от реальных пользователей.


У других известных фирм, которые славятся прежде всего своими холодильниками, варочными панелями или духовками, нет того уровня ресурсной базы, наработок и самое главное — специалистов в этой конкретной области.
Да, у них тоже получаются достойные экземпляры, но самыми лучшими от этого они не становятся. Вы просто переплачиваете за бренд.
Какой мощности должен быть робот-пылесос? В характеристиках можно найти две величины.
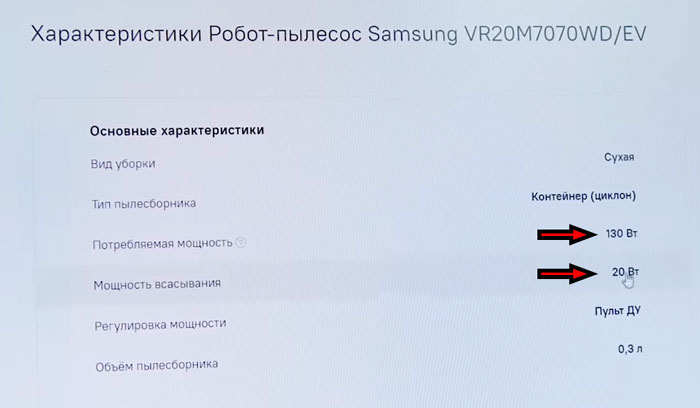
Потребляемая мощность говорит о том, сколько эл.энергии “скушает” прибор после каждой зарядки и сколько по итогу киловатт в конце месяца намотает эл.счетчик.

А вот мощность всасывания (или объемная скорость потока воздуха) — это совсем другое дело. Именно она отвечает за то, насколько хорошо пылесос будет затягивать воздух и всю пыль вместе с ним.
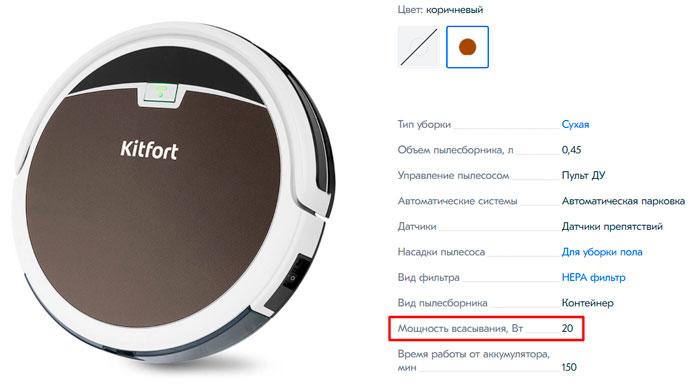
Оптимальное значение всасываемой мощности – 35-40 “аэро” ватт. 20-25Вт все-таки маловато.
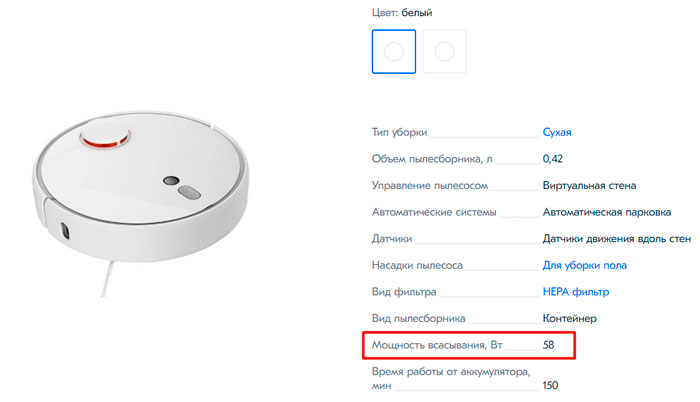
Для того, чтобы с легкостью справляться с шерстью и волосами в паласах и коврах, потребуется уже более 40Вт.
В некоторых характеристиках этот параметр указан в Паскалях. Он показывают перепад давления на входе.
Сахар или соль из ковра он уже не достанет. Он даже не сможет очистить глубокие швы между плиткой и ламинатом.
Традиционные пылесосы гиганты имеют мощность всасывания от 200 до 500Вт. Казалось бы, на что вообще способна кроха с 40Вт на борту?

И здесь все почему-то забывают про высоту подъема мусора. Дело в том, что маленькому “блинчику” вовсе не нужно прогонять пыль по длинной гофрированной трубке.
Поэтому 40Вт ему будет более чем достаточно, чтобы приподнять мусор на пару сантиметров от пола и затянуть его во внутрь себя.
Все традиционные модели изначально имели круглую форму.
Но многие уверены, что круглый робот намного хуже справляется со своими обязанностями, чем новомодные пылесосы D-формы (квадратные).


Да, действительно, квадратный вычищает углы немножко эффективнее. После него мусор остается в радиусе не более 1см со стороны внутреннего угла. У круглого – чуть более 2см.

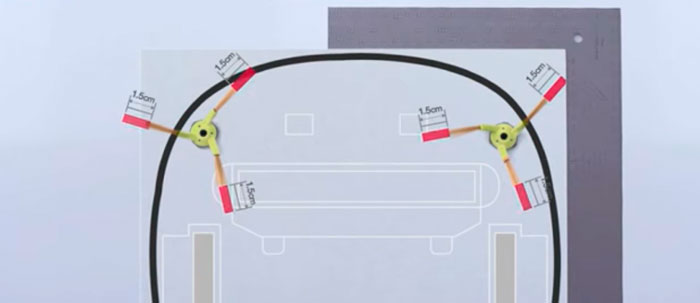
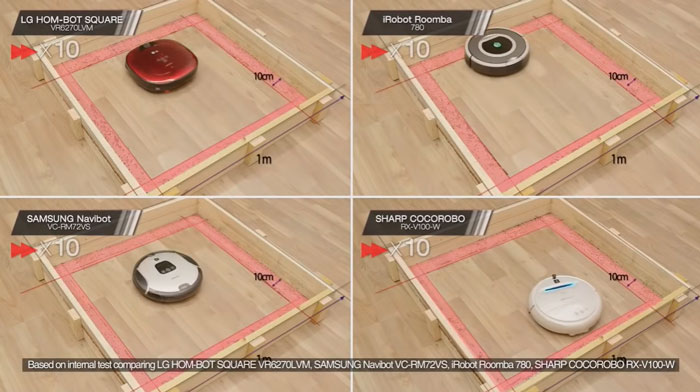
Вот результаты теста трех круглых роботов и одного квадратного собрата, проведенные в идеальных условиях (рассыпанный по углам и краям мусор в замкнутом прямоугольнике).
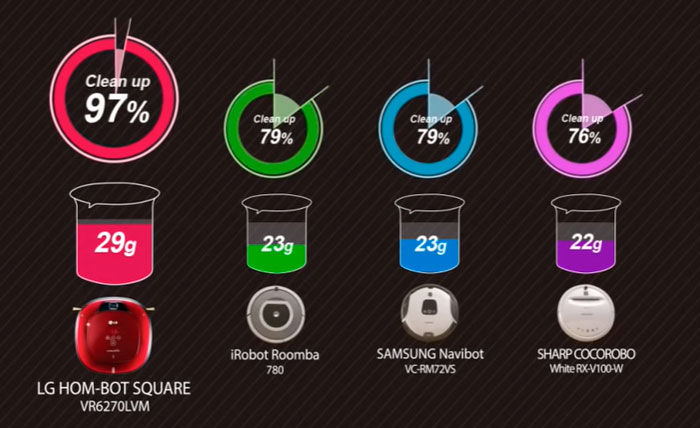
D-робот победил с завидным преимуществом.

Однако посмотрите на свои комнаты и задайтесь вопросом, а сможет ли робот добраться до этих самых углов? Чаще всего они заставлены какой-то мебелью, предметами обихода, трубами батарей и т.п.
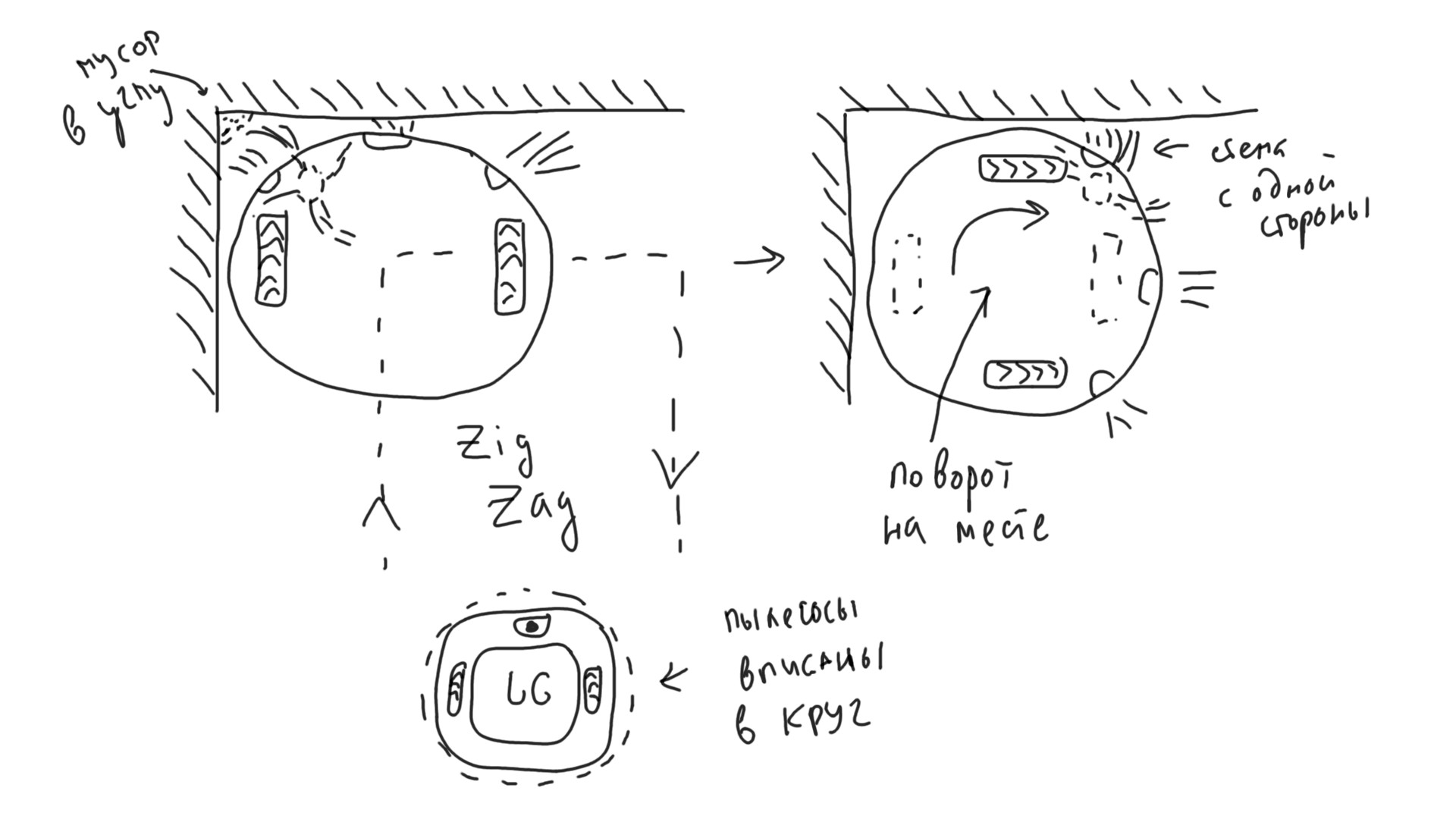
Поэтому в 90% случаев никакой робот попросту туда не доедет, а значит и делать акцент на квадратной форме не стоит. Кроме того, круглый имеет и ряд преимуществ:

После заезда в угол ему не нужно сдавать назад, чтобы развернуться.
Эффективность уборки в углах у него решается более простыми способами:
Существует две разновидности щеток, которыми аппарат захватывает мусор.

Сколько боковых щеток должно быть у хорошего робот-пылесоса?
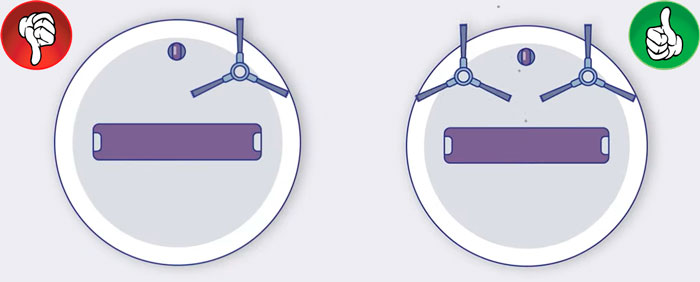
Вовсе нет. Ведущие производители обычно ограничивается всего одной! В первую очередь она нужна при уборке вдоль плинтусов и углах комнаты.
Те, кто ставит по две, объясняют это необходимостью большего захвата очищаемой площади за один проход. На самом деле при хорошей навигации большой роли это не играет.
При передвижении змейкой поверхность одинаково очищается как с одной, так и с двумя щетками. Важнее всего обратить внимание на ИСПОЛНЕНИЕ боковых щеток.

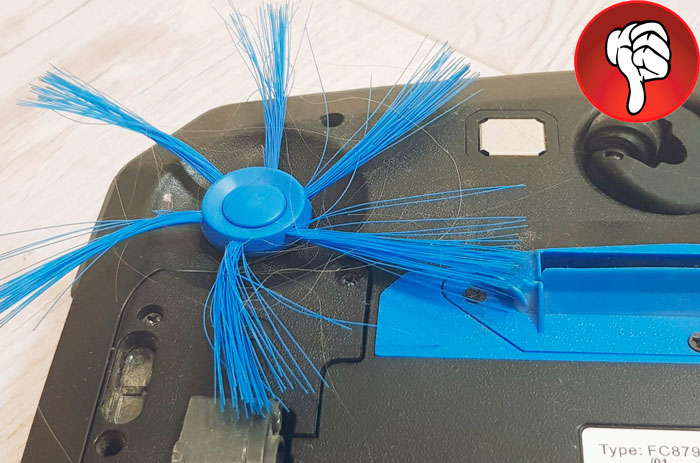

Дело в том, что такие кисточки получаются менее упругими, быстро деформируются и начинают хуже собирать мусор в углах. Ворс должен занимать максимум половину длины.

Самый лучший вариант по износостойкости – силиконовые пятилучевые.
На коврах они однозначно проигрывают ворсу.
Снизу посредине корпуса робота располагается либо отверстие для всасывания воздуха, либо турбощетка. Именно она и является главным уборщиком.

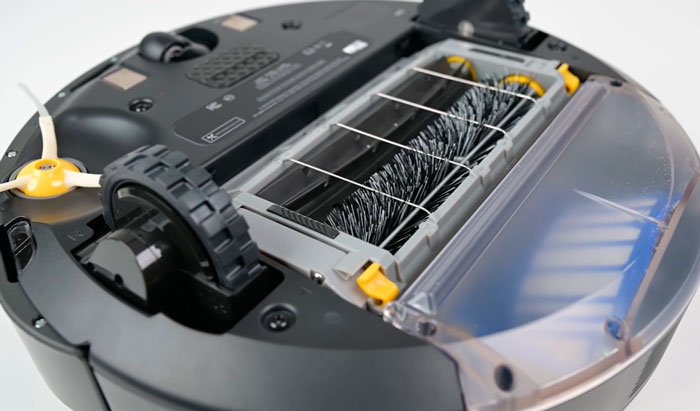

Боковые щетки всего лишь разбрасывают и направляют частички мусора в заданном направлении. Всю основную работу делает центральный воздухозаборник, либо валик с щетиной.
Воздухозаборник подходит только для работы на твердых полах – кафель, линолеум, паркет.
Валик же хорошо собирает мусор, шерсть от домашних животных и длинные волосы на любых поверхностях. Даже с головы, если вы случайно уснули на полу 😊


Без турбощетки практически невозможно нормально очистить ковры и паласы с мелким и средним ворсом.
Производители каждый раз пытаются усовершенствовать центральную щетку, внедряя все новые и новые конструктивные решения. Поэтому обратите внимание – валик валику рознь!



Вот например, валики-скребки от компании IRobot.

Они изготавливаются из силикона и при работе вращаются в разных направлениях.

Так как это запатентованное решение и IRobot был первопроходцем в этом деле, все другие производители вынуждены изобретать свои щетинисто-лепестковые варианты.
Главный недостаток щетины – запутывание и застревание в ней волос и шерсти, хотя и валики этим зачастую грешат.



Поэтому крайне желательно, чтобы щетка была разборной с двух сторон и имела съемные боковые наконечники.
Уборка дома отнимает много сил и времени, поэтому производители разработали умный гаджет – робот-пылесос. С ним можно ежедневно убирать квартиру, не прилагая при этом никаких усилий. Еще пару лет назад роботы-пылесосы были доступны не каждому. Сейчас на рынке большой выбор бюджетных моделей. Кроме того, компания Xiaomi создала линейку недорогих роботов-пылесосов с богатым функционалом.

В стать расскажем, как пользоваться роботом-пылесосом, как строить карты уборки и какие могут возникнуть проблемы при эксплуатации.
Как подготовить квартиру к уборке
Для нормальной работы робота-пылесоса Xiaomi нужно правильно подготовить помещение. В первую очередь убрать все провода и посторонние предметы с пола, так как робот может запутаться или повредиться от случайного столкновения.
Необходимо уделить внимание вещам, которые могут пострадать при столкновении с пылесосом. Это могут быть хрупкие напольные вазы, зеркала.
Кроме того, в квартире можно указать нежелательные места. К ним относятся те уголки квартиры, куда, по мнению владельца, не нужно заезжать пылесосу. Например, углы, в которых он может застрять, запутаться в проводах. Для обозначения этих мест используют специальную клеящуюся ленту. При наклеивании создается виртуальная стена, которая не дает роботу выехать за ее пределы.

Как управлять процессом уборки
Управлять роботом-пылесосом Xiaomi можно со смартфона. Для этого есть приложение, в котором можно задавать график уборки, маршрут и контролировать параметры устройства. Приложение интуитивно покажет пользователю, как создать умную карту робота-пылесоса Xiaomi.
Чтобы осуществлять управление и контроль через приложение, необходимо выполнить следующие шаги:
Роботы-пылесосы Xiaomi различаются по наличию функции влажной уборки. В каждой модели есть разделение на полную и частичную уборку.
При полной уборке происходит построение карты, разделяя большое помещение на квадраты. Затем по зигзагообразной траектории производится уборка каждого квадрата по очереди. Каждый квадрат робот-пылесос Xiaomi проходит повторно. После завершения робот возвращается на базу для зарядки. Если док-станцию переместить на другое место, то робот-пылесос вернется на то место, откуда началась уборка.

Возможные трудности
При использовании робота-пылесоса могут возникнуть некоторые трудности. Зачастую они имеют простые решения.
Карта уборки робота-пылесоса Xiaomi
Как настроить карту уборки робота Xiaomi:
- при помощи камеры на корпусе устройства;
- при помощи лазерного датчика дальномера.
В обоих случая настраивания карт, искусственный интеллект анализирует и сохраняет в памяти параметры помещения. С помощью этого пылесос может создать оптимальный план маршрута уборки.

Карта уборки робота-пылесоса Xiaomi может быть настроена как в автоматическом, так и в ручном режиме. И в том, и в другом случае устройство, по сохраненным ранее параметрам помещения, создает маршрут уборки.
Для ручной настройки карты робота Xiaomi в приложении необходимо ввести параметры квартиры. Отмечается место расположения базы. Все это делается в специальном поле. Затем нужно нарисовать виртуальные стены. Устанавливается количество проходов по каждому из квадратов и время уборки. Все изменения сохраняются. Теперь робот-пылесос готов к работе.
Автоматический способ построения карты
При первом запуске робот-пылесос начнет строить карту уборки в автоматическом режиме. При помощи камеры и лазерных датчиков происходит настройка карты робота-пылесоса. Затем, по своему составленному маршруту, техника начнет уборку помещения. Необходимо дождаться завершения процесс. После чего нужно проверить весь ли объем квартиры убрал пылесос. Если что-то осталось не убранным, нужно перезагрузить устройство, чтобы карта уборки помещения построилась заново.
Добавление робота-пылесоса Xiaomi в Homey
Homey — это специальное дополнение, которое позволяет собрать воедино много речевой информации и преобразовать её в голосовые команды. Для того, чтобы добавить робот-пылесос Xiaomi в Homey, нужно выполнить следующее:
При добавление робота-пылесоса в Homey у каждого индивидуальный путь настройки, поэтому необходимо пошагово выполнить инструкцию по установке, которую выдает приложение.

Определение координат
Корректное определение координат для робота — это одно из основных требований, выполнение которого позволит гаджету работать дистанционно. Эта операция имеет несколько шагов:
Если допущена ошибка в выставлении координат, то можно удалить настройки и пройти процедуру заново.
Обозначение границ зон
Добавление комнат

Робот-пылесос Xiaomi при первом запуске может сам распознать все комнаты, и настройка карты помещения произойдет в автоматическом режиме. Также если между комнатами отсутствуют порожки, то робот будет воспринимать помещение как одну комнату. Дождавшись окончания тестовой уборки нужно проверить охват всех комнат. Если что-то пропущено, то нужно сбросить настройки и дождаться считывания помещения заново.

В ходе эксплуатации пользователи робота-пылесоса могут столкнуться с различными проблемами. Одна из них — робот-пылесос не строит карту. Как правило, это происходит из-за неправильного указания месторасположения базы. В приложении нужно с особой точностью задать точку, на которую гаджет будет ориентироваться, потому что начало и конец уборки ориентирован именно на док-станцию. Если ее положение не фиксированное, то робот-пылесос неправильно построит карту.
Как сбросить карту. Как создать несколько карт
В процессе использования возникают ситуации, когда требуется сбросить карту уборки робота-пылесоса. Зачастую это происходит после обновления прошивки или перемещения док-станции. Чтобы произвести сброс карты уборки помещения, нужно:
Роботом-пылесосом в доме уже никого не удивить. У кого-то они есть, кто-то хочет приобрести, кто-то считает игрушкой. И производители пользуются этими желаниями, и пытаются продать нам что-то. Именно что-то, потому что маркетинговые отделы компаний из кожи лезут, придумывая завлекательные названия и наделяя несложные решения несуществующими возможностями. Дальше я попытаюсь разложить устройство роботов-пылесосов "по полочкам" и рассказать об их сенсорах.
Я не буду делать упор на их внутреннее устройство, платы, процессоры, сами механизмы уборки. Моя задача показать, что ничего сверхъестественного в этих домашних помощниках нет и построены они на базовых принципах, мало-мальски знакомых любому прикоснувшемуся к робототехнике. У меня у самого дома есть робот-пылесос от А-бренда (HomeBot), поэтому иногда я буду рассказывать и на его примере тоже и это не реклама бренда. Более того, домашний пылесос носит гордую кличку "Дурачок", так как работает усердно, но.
Но начнем мы с конструкции, потому что это будет объяснять ту или иную форму. По факту почти все домашние роботы-пылесосы это двухколесная тележка с одним или двумя опорными колесами. Форма у 99% моделей круглая. Почему круг, а не квадрат или треугольник? Достаточно посмотреть на вот эти рисунки.
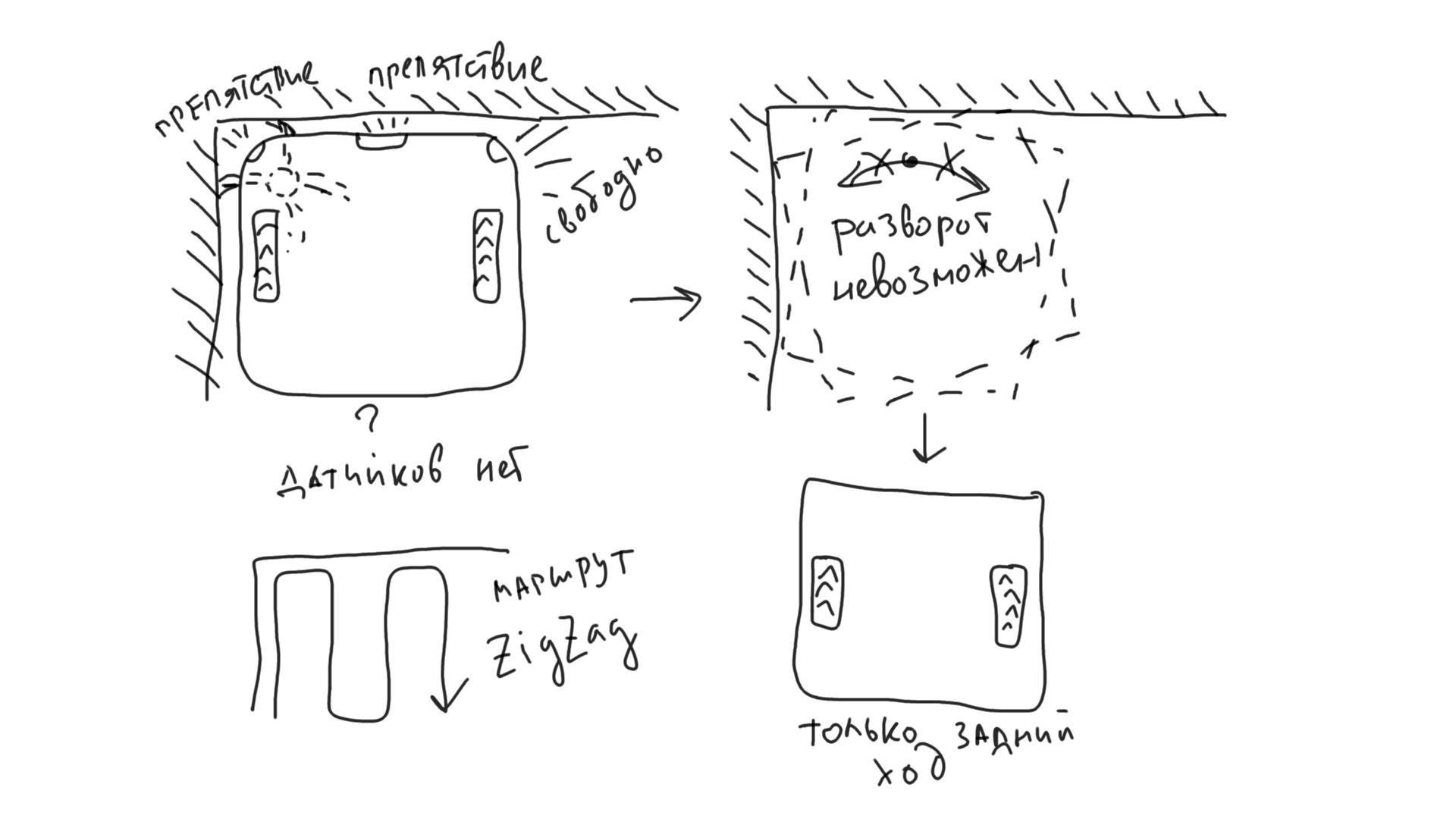
Квадратный пылесос в теории тщательней уберет все углы, так как у нас в большинстве случаев помещения и мебель с прямыми углами, но заехав в угол, он не сможет развернуться, а при движении вдоль стенки так вообще может застрять. С учетом того, что пылесосы убирают "построчно" (это называется алгоритм уборки "зигзаг" и об этом, если вам будет интересно, мы можем поговорить потом), такой робот будет испытывать определенные проблемы с маршрутами. Да, есть производители с "прямоугольным" носом (Hobot, Electrolux и другие), но эволюционно такая форма почти отмерла.
Круглая форма же имеет свои плюсы (двухколесная тележка робота и его симметричная форма позволяет ему разворачиваться на месте) и свои минусы, так как щетки могут не доставать до мусора по углам, а делать их очень длинными тоже проблематично. И даже если производитель заявляет, что у него квадратный корпус, то он будет лукавить (как в случае с моим роботом), так как по факту это будет чуть обтесанный круг.
Круглая форма опять же дает больше места для размещения механизмов и батарей и "по классике" мы имеем спереди робота щетки, посередине отверстие для всасывания мусора и контейнер для него, а сзади саму турбину пылесоса и элементы питания.
И эта форма определяет те датчики и принципы навигации, которые применяются на рынке и именно на примере такой формы мы их и рассмотрим, введя некоторую классификацию.
1. Механизм от игрушки, который хаотично гоняет робота по полу. Никаких датчиков нет.

Игрушечный механизм работает по принципу "повернись, когда упрешься в препятствие", электроники нет, включать и выключать эту игрушку вам нужно вручную. Ни о каких возможностях построения карты помещения, зонирования, возвращения на базу и других умных вещах говорить не приходится. Стоят эти игрушки от 700 рублей.
Плюсом обычно имеем концевой выключатель присутствия контейнера и датчик переворота "на брюхо". Эти два датчика в той или иной реализации есть и у более продвинутых моделей.
2. Добавлен ИК датчик нахождения базы (он же центральный датчик приближения) и бампер на концевых выключателях. Энкодеров на колесах нет, ездит робот "от препятствия до препятствия", возврат на базу по ИК-лучам.
Чуть более сложная конструкция. Ударный бампер есть в той или иной реализации у всех роботов-пылесосов. У кого-то он контактный (то есть стоят концевые выключатели), у кого-то бесконтактный (то есть нет механического перемещения), но без него робот не поймет, что куда-то врезался. А врезаться он будет, потому что различные сенсоры на роботе не всегда могут "охватить" все пространство перед ним, у них есть мертвые зоны и бампер последний шанс робота определить препятствие. Но для некоторых пылесосов это единственная возможность "на ощупь" передвигаться.
Бампер устроен просто: два концевых выключателя и подпружиненная полукруглая пластина. Когда пылесос ударяется в препятствие, в зависимости от его расположения, замыкаются оба выключателя или только слева или справа. И пылесос "понимает", что врезался во что-то перед собой или сбоку.

Сзади датчиков обычно нет.
Базу же, что недорогие, что более дорогие модели, видят благодаря старым добрым ИК-лучам. Два параллельных луча образуют "рельсы", на которые наш пылесос пытается "встать" в итоге и приползти к кормушке. Но данный ИК приемопередатчик, состоящий из сдвоенного инфракрасного светодиода и приемника, может выполнять не только функцию нахождения базы, но играть роль бесконтактного датчика препятствий, чтобы робот-пылесос не упирался в стену перед собой.

ИК-сенсор может быть установлен не по центру, а по бокам, но отказываться от проверенной технологии производители не спешат, а еще это позволяет управлять пылесосом с обычного ИК-пульта.
Поэтому производители и рекомендуют оставлять справа и слева от базы по метру-полтора, чтобы был свободный "подъезд" к ней, но мой робот-пылесос спокойно живет в закутке за диваном и находит базу.

4. к. п 3. добавляем энкодеры. Пылесос может точнее отрабатывать свое положение и его повороты уже предсказуемы, а отклонение от прямой линии определяемо. Такой робот будет стараться ездить параллельно линиям своего маршрута и понимать, что повернулся на нужный угол. Мотор-колеса пылесосов снабжаются энкодерами разного типа: щеточными, резистивными, оптическими, на датчиках Холла и т. п. Но цель одна: определить, на какой угол повернулось колесо.
Энкодер также можно поставить только в поддерживающий ролик и определять перемещение по его кручению и повороту. Это позволяет использовать дешевые мотор-редукторы в колесах и упрощает конструкцию, так как оптические датчики энкодера в таком случае просто распаиваются на управляющей плате.

5. к. п. 4 добавляем нижние ИК-датчики уровня. Пылесос перестает падать и может различать высоту (немного, но может). Обычно пункты 4 и 5 делают совместно, так как пылесосы такого уровня уже стоят до десятка тысяч рублей и допускать его падение нежелательно. Минимально (и стандартно) датчиков три: по центру и ближе к бокам и представляют они собой привычные ИК-датчики. В теории наш робот-пылесос можно научить даже ездить по начерченной линии. При наличии такого набора датчиков (п. 3 - п.5) наш пылесос уже можно считать роботом. Он уже сможет построить простейшую карту местности и при следующих прогонах стараться не тыкаться в препятствия.
6. к. п 5 добавляем ИК датчики на бампер не только по центру.
Пылесос теперь не тыкается в препятствия в виде вертикальной стены. Ножки он, конечно, еще не видит, шторы может продолжать жевать, но уже может строить карту препятствий. Пример такого пылесоса Xiaomi Mop Essential. За черной полоской на бампере закреплено дополнительно по окружности по три ИК-датчика (два по центру как мы помним есть у многих моделей) и они позволяют обнаруживать что-то отражающее ИК-лучи раньше, чем сработает ударный "концевик".

Также у таких моделей уже часто присутствуют компас и гироскоп, что улучшает навигацию. Бампер может быть не ИК или контактным механическим, а ультразвуковым и с датчиком удара по его поверхности (так сделано у моего HomeBot).

Что ИК, что ультразвуковые сенсоры позволяют также определять расстояние до препятствий, но ультразвук позволяет это делать гораздо точнее и у таких моделей играет роль также датчика расстояния.
7. к. п 8 добавляем боковые ИК-датчики в слепые зоны для контроля притирания пылесоса к стене.

Что происходит "сбоку" от пылесоса, он увы может и не увидеть и часто роботы могут начать "тереться" о стену (а иногда могут и обои "подрать"). Поэтому некоторые производители добавляют ИК-сенсоры по бокам робота, если не используют сенсоры по периметру бампера (например, у пылесосов с лидаром).
9. к п.8 добавляем сенсоры построения карты помещения по препятствиям и навигации в пространстве. До данного пункта у нас роботы-пылесосы могли определять препятствия перед собой, отслеживать маршрут по повороту своих колес и даже определять препятствия сбоку или пытаться найти себя по показаниям компаса. Но все это далеко от того, что можно было бы назвать "навигацией". Да, роботы-пылесосы у нас еще не доросли до применения GPS/GLONASS (да и в помещениях от этих технологий толку часто мало, сигнал глушится, точность не для сантиметровых размеров в квартирах), но хотелось бы, чтобы робот-пылесос не терялся в двух-трех комнатах и старался убираться не хаотично, а последовательно помещение за помещением. Да и алгоритм "зигзаг" не позволяет убирать полностью комнату с хаотично расставленными вещами.
Поэтому производители для ориентации в пространстве ставят на роботы дополнительные датчики, задача которых строить карту помещения и определять, где робот находится в текущий момент, где он уже убрался, а где еще нет. После тестовых прогонов, так как мебель и расположение помещений обычно не меняется, это позволяет роботу-пылесосу уверенно передвигаться и быстрее выполнять уборку, строят оптимальный маршрут.
Данные сенсоры в основном представлены следующими видами: лазерный дальномер (он же LDS, он же лидар), широкоугольная камера с машинным зрением, ToF камера и даже 3D-камера (то есть комбинация ИК-камеры разметки и камеры ее считывания по типу FaceID в айфонах). Возможна комбинация устройств сверху, в передней части, в задней части и снизу (для определения разных типов поверхности).
Пылесосы с лидаром достаточно массово распространены в средне ценовом сегменте, эта технология позволяет строить карту помещения с высокой точностью, но опять же имеет свои минусы: "башня" лидара часто мешает проехать пылесосу под мебель, а ее расположение на верху пылесоса мешает ему замечать низкие препятствия и пылесос в таком случае часто полагается только на ударные датчики бампера. И лидар очень не любит зеркала, и такой робот может "играть" в злобное создание, кидающееся на свое отражение.

Камера имеет также свои плюсы и минусы. Обычно ставится только верхняя камера, которая отлеживает изменения на поверхности потолка (как современная компьютерная мышь) и пытается по ним отслеживать карту изменений. Хоть производители и говорят, что их роботы "видят" в темноте, опыт эксплуатации показывает, что пылесосам с камерой лучше везде включить свет :) У меня как раз пылесос с навигацией по камере.

Дорогие модели сейчас пытаются избавить от лидаров, установив как верхнюю камеру, так и переднюю камеру с датчиком глубины (ToF), чтобы определять расстояние до объектов по времени отражения сигнала. Опять же это ИК-камера, и она обычно замещает передний ИК-датчик базы.

Плюс производители пытаются заигрывать с машинным зрением, 3D и AI, но пока чаще всего это только заигрывания с потребителем и маркетинговые уловки.

Вот такой немного сумбурный обзор, но надеюсь он показывает, что в устройстве роботов-пылесосов с точки зрения датчиков нет ничего сверхъестественного и все, что применяют их конструкторы, проверено временем и эксплуатацией на множестве робототехнических устройств. И часто даже такой простой набор датчиков может быть дополнен отличным софтом навигации и распознавания препятствий и поэтому программная начинка тут немаловажна. Но это уже совсем другая история.
А у вас есть робот-пылесос? И какие датчики есть на нем? Напишите в комментариях об этом, а также можете дополнить мою классификацию.
Читайте также: