
Турбина робота пылесоса распиновка
Обновлено: 20.05.2024
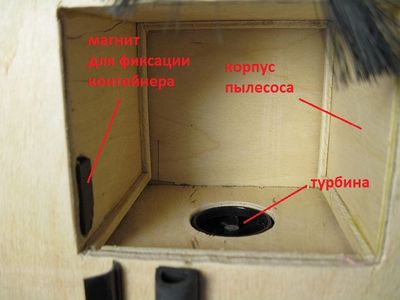
Для очистки воздуха от пыли применяется фрагмент от кухонной салфетки, изготовленной из волокнистого синтетического материала. Элемент устанавливается под основанием контейнера пылесборника и удерживается магнитами. В самом контейнере прорезается прямоугольный канал, через который затягивается воздух с пылью. Для регулировки зазора между резервуаром и напольным покрытием применяется сменное дистанционное кольцо из картона или пробки.
Описание самодельного робота пылесоса
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

Робот пылесос — Часть1 Механика
Наверное, каждый, кто только начинает по-настоящему увлекаться робототехникой, электроникой или программирование, проходя сложный путь изучения сопутствующих технологий, надеется в будущем применить накопленные знания для работы над серьёзным и интересным проектом.
Я вот, например, почитав робофорум. решил собрать робот пылесос. Причина такого выбора не столько в полезности данного устройства, сколько в том что, разрабатывая его, можно сконцентрироваться на конкретной задаче: робот способный автономно убирать мусор при минимальном обслуживании.
Данная статья не является подробным описанием по сборке и настройке робота. В ней я, главным образом, хотел бы изложить свой опыт, полученный во время выполнения данной работы.
Из всей механики робота пылесоса особую сложность в проектировании и изготовлении представляет мусороуборочный узел.
-Занимать как можно меньше места, но при этом иметь вместительный контейнер для мусора.
-Хорошо убирать загрязнения на любых поверхностях, но при этом обладать низким энергопотреблением и уровнем шума.
Прежде чем удалось добиться выполнения всех этих запросов, было перепробовано множество различных вариаций компоновки узла.
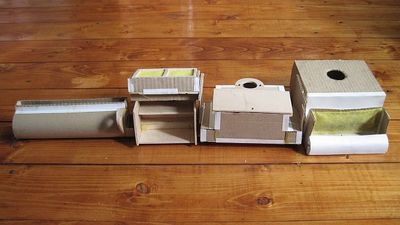
Макеты мусороуборочных узлов.
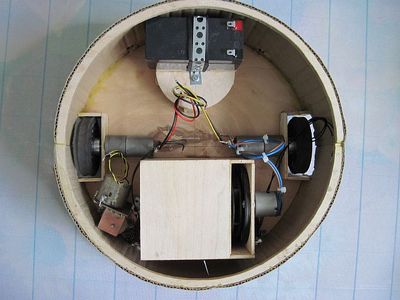
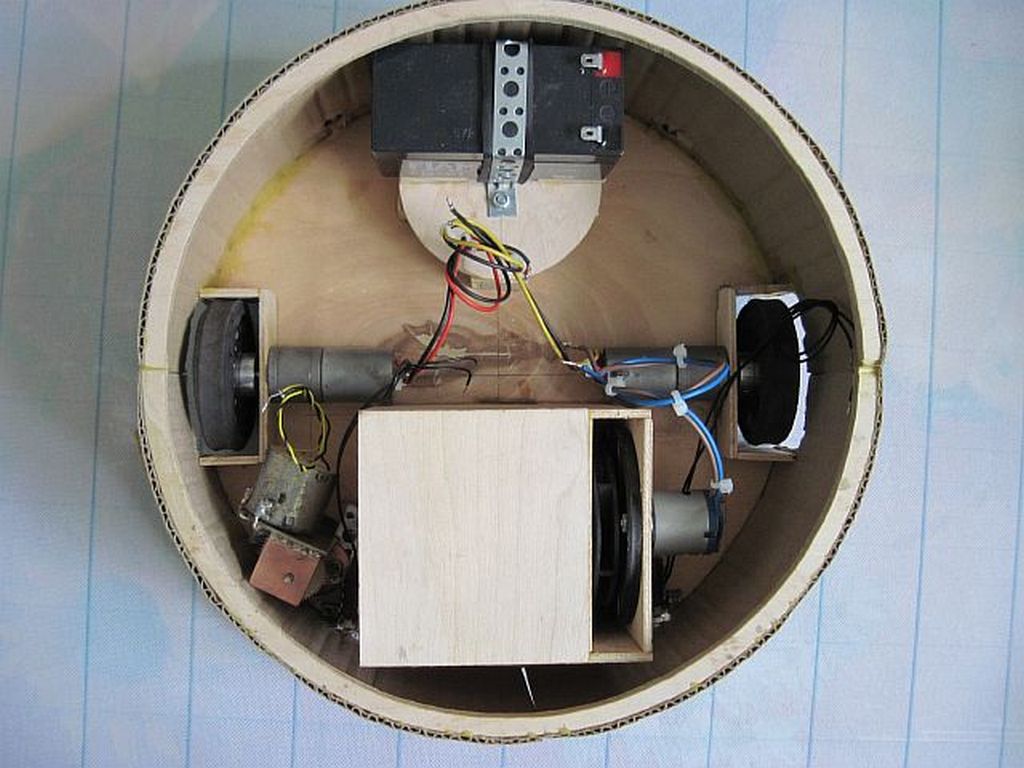
В конце — концов, остановился на схеме: широкая боковая щётка + пылесос. Радиальная щётка, расположенная с правой стороны, загребает мусор к жерлу пылесоса, расположенному по центру. Горизонтально-цилиндрическую щётку, как у Румбы, решил не ставить, так – как она лишь незначительно увеличивает качество уборки, но при этом сильно осложняет конструкцию жерла пылесоса. Устройство пылесосящего узла представлено на фото ниже.




Однако возникает вопрос: Где взять турбину и двигатель для пылесоса?
Можно спаять турбину из стеклотекстолита и жести
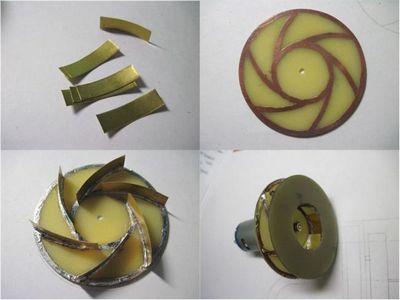
Турбина из жести.
Можно взять готовую турбину от большого пылесоса, предварительно обрезав её на токарном станке.

Готовая турбина, обрезанная на токарном станке до нужного диаметра(вентилятор от компьютера для сравнения).
А ещё её можно купить, в виде дешёвого китайского автомобильного пылесоса.
Не сочтите за рекламу, но рекомендую брать именно этот пылесос(kioki), так как в нём гарантировано правильная турбина с мощным двигателем и удобным краплением (при цене, в среднем, 500р). Хотя, что касается двигателя – то его лучше заменить. У стандартного потребление порядка 3А, при замене на двигатель QX-RS-385-2073 с потреблением 1.2А, мощность всасывания падает незначительно, зато робот начинает меньше шуметь и дольше бегает без подзарядки. Что касается самодельных турбин, они хоть и хорошо всасывают, но их довольно сложно отцентрировать так чтобы не было вибрации.
Боковая щётка собрана из двигателя от магнитофона, подключённого к оси с трещоткой (вынул из игрушечного шуруповёрта) через червячную передачу. Кисточки вынуты из половой швабры, и закреплены на диске из стеклотекстолита с помощью секундного клея.

Радиальная щётка.
В качестве приводных моторов служат два 25милиметровых моторредуктора, наверное, здесь нужно что-то более подходящее, например переделанные под постоянное вращение сервоприводы, но я поставил то что было под рукой.
Готовых колёс нужного размера не нашлось, поэтому пришлось вырезать их 10милеметровой фанеры и обклеить теплоизоляционной лентой, для лучшего сцепления с поверхностью. Отверстия в колесе – для энкодеров, хотя в конечном счёте я отказался от их применения из-за низкой точности.

Мотоблоки желательно ставить на независимую подвеску. В данной модификации робота я решил проверить, действительно ли она нужна, установив двигатели без подвески, в результате возникли проблемы при заезде на толстый ковёр. Оси двигателей должны совпадать диаметром окружности робота, так будет проще реализовать развороты на месте.

Подруливающее колесико.
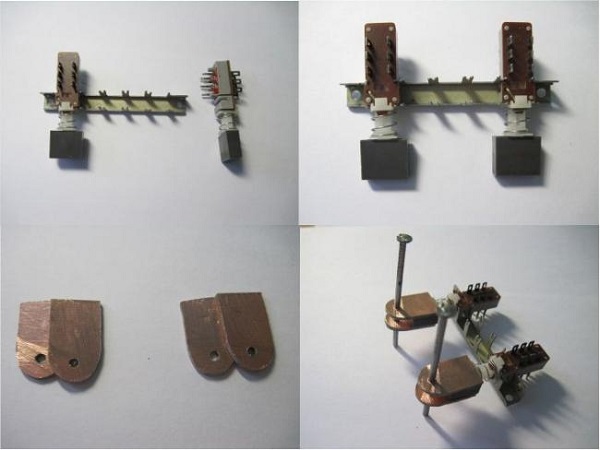
Датчик соударений(далее бампер), сделан из двух переключателей и подвешенной на них полоске из пластмассы согнутой полукругом.
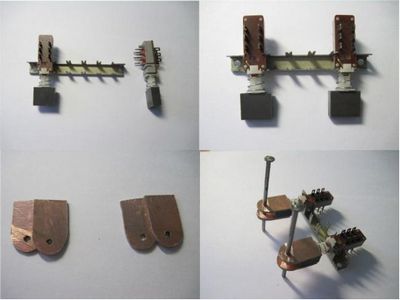
Переключатели

По нормальному бампер должен закрывать собой всю морду робота снизу доверху, но так-так вся мебель у меня одной высоты, то я с этим заморачиваться не стал.

Механика робота в собранном виде.
Для проверки механической части робота была собрана следующая, простая, схема управления:
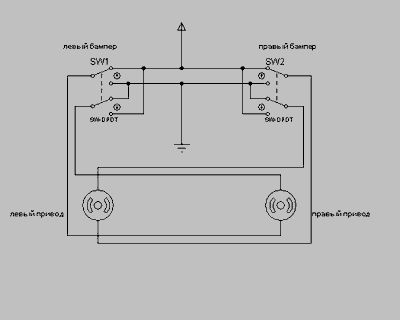
Движение в пространстве

Робот-пылесос с помощью ультразвукового дальномера измеряет расстояние между предметами
Виртуальная стена позволяет ставить ограничения на работу оборудования. Этот ограничитель работает при помощи инфракрасного датчика. К примеру, если вы хотите, чтобы уборка проводилась только в одной определенной комнате, модели с такой функцией будут очень кстати.

Виртуальная стена позволяет ставить ограничения на работу робота-пылесоса
Модели с инфракрасным сенсором будут актуальны в помещениях с лестницами. Именно эта функция не позволяет роботу упасть с высоты во время уборки. Также некоторые модели имеют специальный алгоритм чистки, который может корректировать пользователь. Дополнительные датчики могут тщательно сканировать пространство на предмет особенно загрязненных участков. Такие места пылесос будет чистить дольше и более интенсивно.
Современные модели имеют дополнительную систему распознавания сложных участков. Например, если робот во время уборки запутается в проводах, то функционирование всей системы прекратится до тех пор, пока устройство не съедет с опасного участка. Также такие модели имеют специальный датчик для распознавания типа поверхности. Таким образом, уборка будет проходить максимально аккуратно и качественно.
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Робот-пылесос своими руками 86
Arduino, Программирование робототехники
Планы на будущее
Вы можете помочь и перевести немного средств на развитие сайта
Рекомендации по эксплуатации
Правила использования оборудования:
- протирать пылесос нужно только сухой тряпкой;
- если робота не планируется использовать в ближайшее время, лучше вытащить аккумулятор;
- перед началом уборки уберите с пола мелкие и хрупкие предметы;
- не трогайте зарядное устройство или робота мокрыми руками;
- не убирайте при помощи робота химические вещества и краску;
- регулярно нужно очищать контейнер и колесико.
Что для вас предпочтительней: живое общение, или любимый мессенджер?
Общение — это когда видишь собеседника лично. Все остальное — иллюзия общения. 293 ( 29.24 % )
Общаюсь и в живую, и в соц сетях. Один способ вовсе не исключает другой. 620 ( 61.88 % )
Используя такую технику для дома правильно, можно существенно сэкономить свое время.
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени. Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.
Робот-пылесос своими руками
Описание самодельного робота пылесоса
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Необходимые материалы
Чтобы сделать робот-пылесос своими руками, вам потребуются следующие материалы:
Колеса для самодельного робота-пылесоса
- Мотор, обеспечивающий вращение щетки в различных режимах.
- Мотор высокой мощности, обеспечивающий нормальное функционирование турбины.
- 4 литийионных аккумулятора, а также средство контроля над ними.
- Фанерное основание нужного размера.
- Корпус из поливинилхлорида нужного размера.
- 8 пар магнитов для крепления.
- Провода, кабели, переключатели и прочие элементы электрической сети.

Автор, специалист в сфере IT и новых технологий.
Получил высшее образование по специальности Фундаментальная информатика и информационные технологии в Московском государственном университете имени М.В. Ломоносова. После этого стал экспертом в известном интернет-издании. Спустя время, решил попробовать писать статьи самостоятельно. Ведет популярный блог на Ютубе и делится интересной информацией из мира технологий.
Чтобы создать робот-пылесос своими руками, достаточно приобрести необходимый минимум теоретических знаний и набор легкодоступных комплектующих. Такой помощник будет поддерживать полы помещений в чистоте, экономить время на уборке. Благодаря наличию специальных датчиков, механизм самостоятельно не только перемещается по комнате, но и ориентируется в ней. Процесс изготовления в домашних условиях потребует затрат времени и терпения, но схема создания достаточно проста и доступна даже любителям, а затраченные на это средства гораздо ниже цены рыночных аппаратов.
Теоретические аспекты проблемы
Домашние умельцы вывели практическим путем требования к роботам-пылесосам, которых следует придерживаться при их создании. Результатом соблюдения будет механизм, пригодный к дальнейшей эксплуатации. Перечень основных правил следующий:
- рекомендуется изготавливать робот в форме небольшого цилиндра;
- для того, чтобы автомат мог осуществлять развороты на месте – колеса следует размещать по диаметру;
- дополнительному рулевому колесу привод не требуется;
- механизм должен собирать мусор в легко вынимаемый мусороприемник;
- робот обязательно должен быть оснащен контактным бампером, занимающим минимум половину его окружности;
- зарядку аппарата следует проводить от зарядного устройства, без его разборки;
- наилучшим местом размещения центра тяжести у робота являются колеса, также допускается располагать его рядом с ними;
- оптимальная скорость движения – от 25 до 35 см/с;
- двигатели работают совместно с редукторами, оснащенными пружинами.
Выделяются модели с шаговыми двигателями, что позволяет программно управлять ими без применения редукторов.
Способы обеспечения движения, уборки и питания робота-пылесоса
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи. Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот. Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Самостоятельный возврат робота к месту зарядки – сложная задача, которую можно решить установкой передающего маяка.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд. Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс. Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
Сборка робота-пылесоса
Подготовив все необходимое можно приступать к сборке. Она заключается в прохождении вышеописанных этапов.
- Создаем корпус цилиндрической формы из картона либо поливинилхлорида: диаметр – 30 см, высота – 9 см, толщина стенок – 0,6 см. Дно лучше вырезать из фанеры.
- Закрепляем на корпусе поливинилхлоридный бампер при помощи скотча, предварительно установив в него датчики инфракрасные и реагирующие на удар.


Важным моментом работы является возвращение бампера в исходное положение после удара о препятствие, то есть достаточная его упругость.
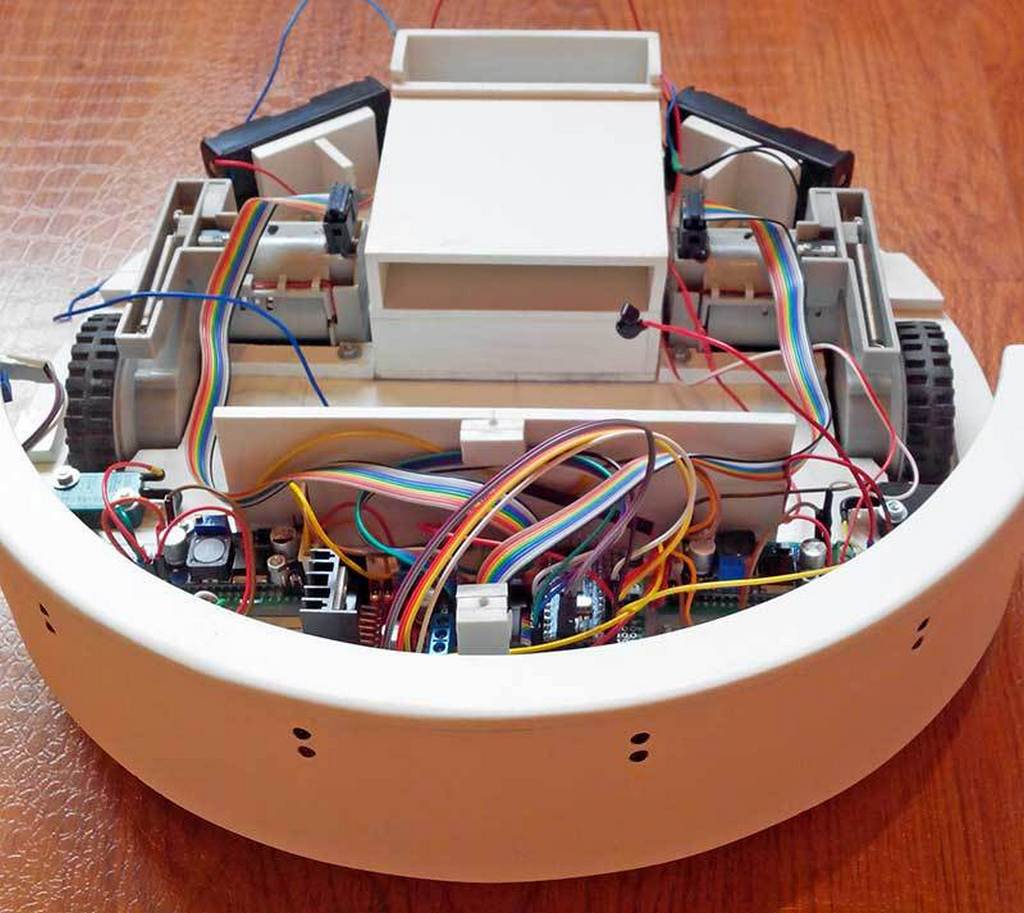
Все детали закрепляются на имеющиеся для этих целей у них разъемы саморезами либо клеем, скотчем. Полученный результат представлен на фотографии:
Робот-пылесос – нужная машина. Но у нее есть один существенный недостаток – цена.
Хорошая модель стоит недешево, а дешевая модель больше напоминает игрушку, но за нее тоже нужно заплатить определенную сумму.
Поэтому народные умельцы предпочитают собирать такие системы самостоятельно, благо в продаже для этого есть все комплектующие.
Многие из них охотно рассказывают, как сделать пылесос-робот своими руками.
Самое важное в этом деле, кроме необходимой базы запчастей, — почувствовать себя настоящим конструктором и не бояться экспериментировать. А получившуюся модель всегда можно улучшить.
Материалы для сборки робота-пылесоса в домашних условиях
Перед тем, как сделать робот-пылесос, нужно подготовить все необходимое.

- Ножницы;
- Циркуль;
- Простой карандаш;
- Линейка;
- Пистолет для термоклея;
- Две трубки термоклея.
- Гофрированный картон размером 1.5х1.0 м;
- Марля размером 0.3х0.3 м;
- Резинка для банкнот.
- Два блока колес;
- Плата ARDUINO UNO;
- Драйвер двигателя L298N;
- Два мотора на метелки по 12 В;
- Датчик приближенности для Ардуино ультразвуковой;
- Блок аккумуляторов;
- Кулер от компьютера из системного блока;
- Опорное колесо.
Как сделать робот-пылесос своими руками в домашних условиях
Когда все комплектующие и материалы в наличии, следует преступить к сборке.

Общий план таков:
- Вначале собирают корпус – здесь каждая деталь оригинальна и изготавливается отдельно;
- Следующий этап – установка Ардуино для робота-пылесоса своими руками и другой электроники, блока аккумуляторов и коммутация их проводами;
- В корпус устанавливают приводы – это колеса и моторы боковых щеток;
- Далее изготавливают всасывающий узел и крепят его к корпусу;
- Крепят самодельные боковые метелки;
- Программируют устройство и проводят полевые испытания;
- Если все работает, закрывают корпус верхней панелью.
Сборка корпуса из картона и установка Ардуино
Как сделать робот-пылесос, начиная с корпуса:
Изготовление всасывающего модуля с турбиной
- Из картона делают прямоугольный канал без торцовых частей, размер которых равен размеру основания кулера. Высота канала 25 см;
- Посередине канала под наклоном 30 градусов вклеивают перегородку. С верхней стороны наклона должен быть зазор шириной 2 см между перегородкой и стенкой канала;
- Изготавливают маленькую коробочку без крышки с размером сторон равным размеру перегородки и высотой бортов 5 см и устанавливают ее на перегородку;
- Под перегородку в низ основания канала вставляют и вклеивают кулер так, чтобы он дул на перегородку;
- На верхнюю часть канала надевают кусок марли, и свободные концы фиксируют резинкой для банкнот вокруг канала;
- Канал стороной кулера приклеивают напротив отверстия в середине основания пылесоса;
- В верхней панели вырезают прямоугольник под канал и надевают сверху.
Коммутация схем и настройка программы
После того, как установлены все элементы, питание колес подключают на драйвер колес на соответствующие управляемые разъемы. Моторы метелок подключают к выводам, где появляется постоянное напряжение при включении тумблера.

Тумблер впаивают между батареей и питанием схемы Ардуино. Схему датчика приближения подсоединяют к Ардуино. При включении тумблера пылесос начнет двигаться по площади, обходя предметы.
Настройка платы заключается в регулировке скорости (величины подачи напряжения на ведущие колеса), которая не должна превышать 30-25 см/с. Чтобы аппарат не ехал куда не нужно, можно подумать, как сделать виртуальную стену для пылесоса-робота своими руками.
Сборка корпуса из пластика и фанеры
Как сделать робот-пылесос не из картона, а, например, из пластика и фанеры? Очень просто.
В этом случае нижнюю часть вырезают из 4 мм фанеры при помощи электролобзика (размеры аналогичны вышеописанным).
В качестве торцовой части корпуса и верхней крышки можно использовать пластиковое ведро из-под фасадной краски (диаметр не должен превышать основания). Его обрезают так, чтобы высота с дном не превышала 20 см.

После того как на нижней части установят все оборудование и на ведре закрепят датчик приближения, ведро переворачивают и прикрепляют к основанию при помощи уголков.
Изготовление системы всасывания пыли
Турбину для робота-пылесоса своими руками в этом варианте конструкции можно изготовить по-иному принципу:
- В качестве емкости пылесборника берут пластиковую емкость (объем — 1 литр);
- В дне емкости посередине делают прорез шириной 1 см и длиной 10 см;
- Из прозрачного файла для бумаги вырезают прямоугольник шириной 3 см и длиной 12 см;
- Этим прямоугольником накрывают прорезь внутри емкости и фиксируют пленку с одной стороны скотчем на всю длину (12 см);
- Получается клапан, который при втягивании воздуха внутрь емкости открывается, а при выключении пылесоса перекрывает канал;
- В крышке от емкости делают отверстие, по диаметру равное диаметру крыльчатки вентилятора;
- Вентилятор крепят к крышке с внутренней стороны, с наружной – наклеивают мелкую пластиковую москитную сетку;
- Крышку ставят на место – турбина готова.
Как и в предыдущем варианте робота-пылесоса, после проведения всех работ по коммутации устройств между собой, необходимо провести настройку прибора.

Эта настройка заключается в выборе скорости движения машины. Отвечает за эту функцию драйвер двигателя.
Заключение
Рассмотренные самодельные модели роботов-пылесосов хороши для проведения быстрых уборок, когда нужно подмести полы.
Чтобы подобные аппараты могли хорошо втягивать и пыль – недостаточно обычного вентилятора от компьютера.
Нужно использовать более мощные моторы, например, от фена, и лопасти нужно изготавливать другой конструкции.
В этих же моделях для лучшего эффекта всасывания нужно соблюсти расстояние от дна до пола не более 1 см.
Робот-пылесос самодельной конструкции нельзя использовать в местах, где есть возможность падения его с высоты.
В простой системе не предусмотрены датчики контроля уровня пола. В сети имеются лайфхаки как сделать пылесос-робот моющим.
Читайте также: