
Датчик давления в пылесосе
Обновлено: 12.05.2024
Всем привет, принимайте новенького!
В общем задался я задачкой. Есть робот-пылесос Irobot Roomba 776p. Помимо прочего, не относящегося к теме вопроса, у робота есть шесть оптических сенсоров по периметру его дна, состоящие из простых ИК оптопар и отслеживающие перепады высот, чтобы робот не падал с лестниц и т.д. Есть отраженный сигнал от пола на приемнике - пол ровный, едем дальше. Пропал сигнал на приемнике - перепад высоты, стоим чтобы не упасть. И все бы хорошо, но робот категорически отказывается работать на коврах с черными пятнами/полосами, так как считает, что это дыры в полу. Конструктивно принудительного переключения этих датчиков с режима обнаружения перепадов высот на режим "ровного пола" производителем не предусмотрено. Так вот задача - реализовать такой режим. Моя идея состоит в том, чтобы добавить в робот еще одну оптопару, переключение на сигналы которой обманывало бы робот, так как приемник и излучатель стояли бы рядом и на приемнике всегда был бы сигнал "ровного пола". Излучатель этой оптопары можно было бы включить параллельно одному из штатных ик-светодиодов какого-нибудь из шести датчиков робота. А вот что делать с приемником, пока никак не могу придумать. Нужно, чтобы по переключению кнопки/переключателя, в цепи приемников всех шести сенсоров робота, подался бы сигнал с этого фейкового приемника. То есть нужно городить разрыв штатных цепей фотоприемников робота и каким-то образом включать в них этот фейковый приемник, но один на все шесть )). Мне нужен пинок в правильную сторону , а дальше я уже разберусь )). Заранее спасибо за идеи ).
Нужен алгоритм для генерации значений высот в карте высот
В примере GeneratedGeometry по XNA генерация местности осуществляется на основе карты высот (.вмр.
Датчик перепада давления
Здравствуйте, Не могу найти датчик перепада давления (до и после сепаратор, а измеряемая среда.
Датчик перепада давления
Здравствуйте! Пытаюсь поставить датчики Зонд-10 дд1161 на диаэраторы, но безрезультатно:( на трм.
Надо посмотреть на оптопару если на выходе стоит транзистор, то скорее всего можно его зашунтировать резистором (поставить между его коллектором и эмиттером) да и все. Система будет всегда понимать, что "пол есть" и будет везде нормально ездить. Но в принципе, возможно, есть регулирование чувствительности ваших датчиков - тогда можно просто адаптировать оптопару под ваши условия. Тут надо смотреть схему.
ЗЫ: имхо, я бы не "боролся" бы с датчиками. Они ж реагируют, например, на "отрыв" робота от пола. Подняли вы его - моторы остановились.

Сравним три популярных датчика пыли. Стоит ли переплачивать за более дорогой? Какие наиболее распространенные ошибки допускают при работе с бюджетными датчиками? Ответы под катом.
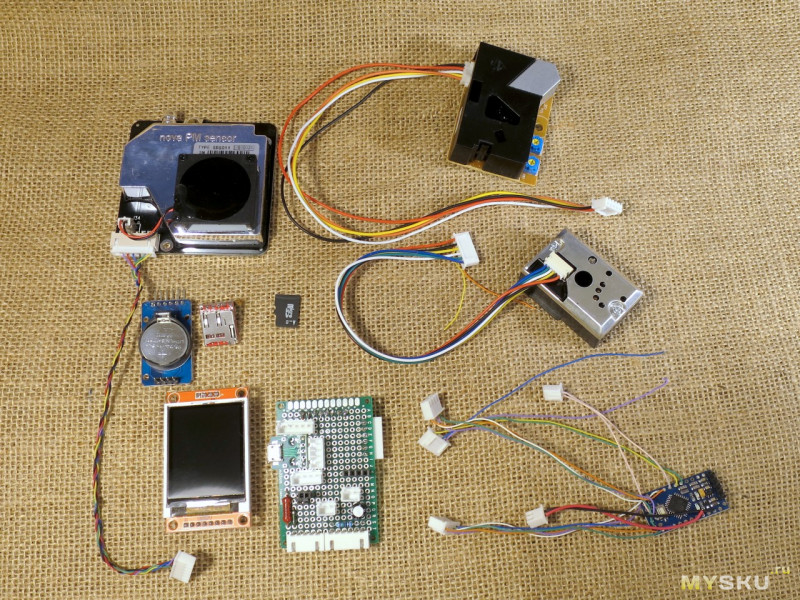
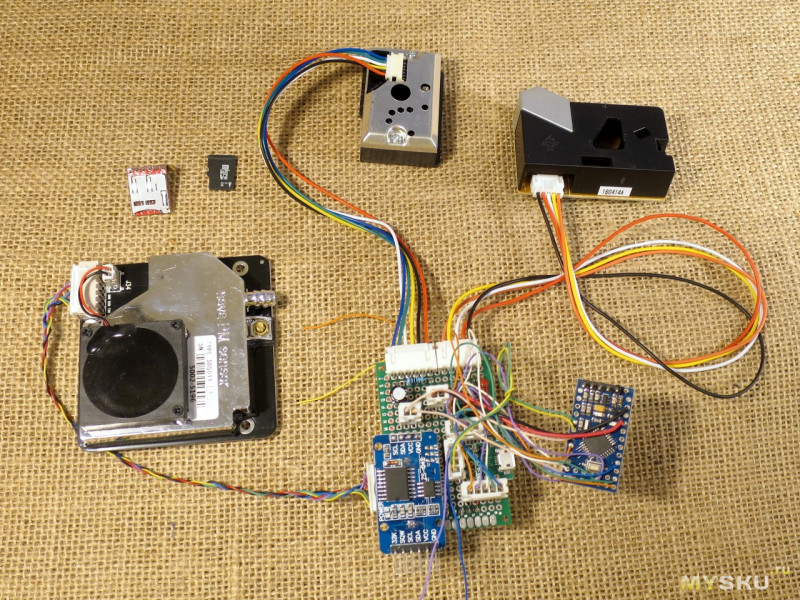
Об устройстве чуть позже, сначала посмотрим внимательнее на датчики.
SDS011
Первый датчик лазерный, фирмы Nova Fitness. Он предназначен для определения количества пыли размером от 0,3 до 10 мкм в воздухе. Датчик разделяет пыль на две категории — размером от 0,3 до 2,5 мкм и от 2,5 до 10 мкм. Это общепринятая классификация, и наиболее опасна для здоровья пыль от 0,3 до 2,5 мкм.

Как и у многих современных датчиков, у этого два типа представления данных. Он способен передавать сведения в последовательный порт, а кроме того, имеет два выхода, скважность сигналов на которых пропорциональна концентрации пыли двух размеров.


Датчик снабжен центробежным микровентилятором.
В комплект входит переходник с последовательного порта на usb.

GP2Y1014AU0F
Второй датчик производства фирмы Sharp. Он дешевле, компактнее и проще первого. Определяет пыль по принципу фотометрии. Краткие характеристики:
потребляемый ток: 20 мА
напряжение питания: 5 вольт
чувствительность: 0,5 вольт/100мкг/м3
размеры: 46х30x17,6мм
диапазон измерений: 0 — 500 мкг/м3
Вентилятора у датчика нет, что с одной стороны является преимуществом, но с другой обещает не такую быструю реакцию датчика на изменение атмосферы.
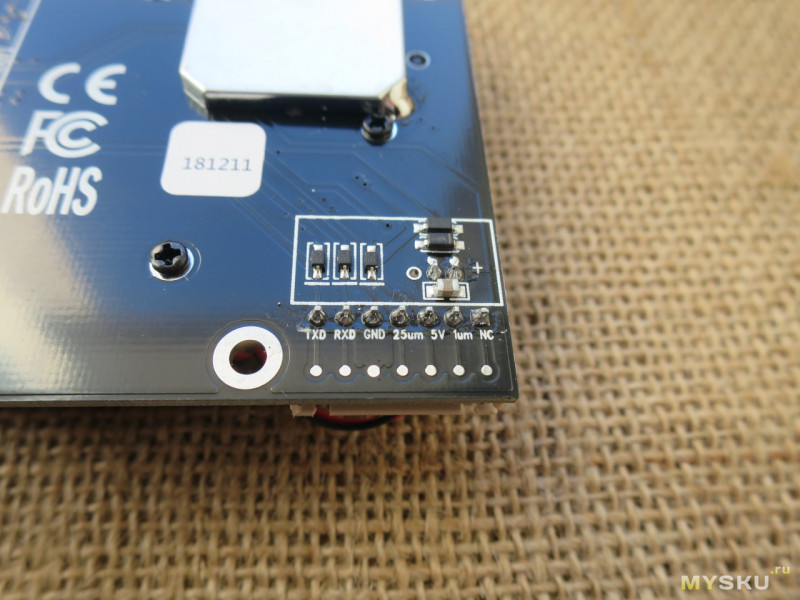
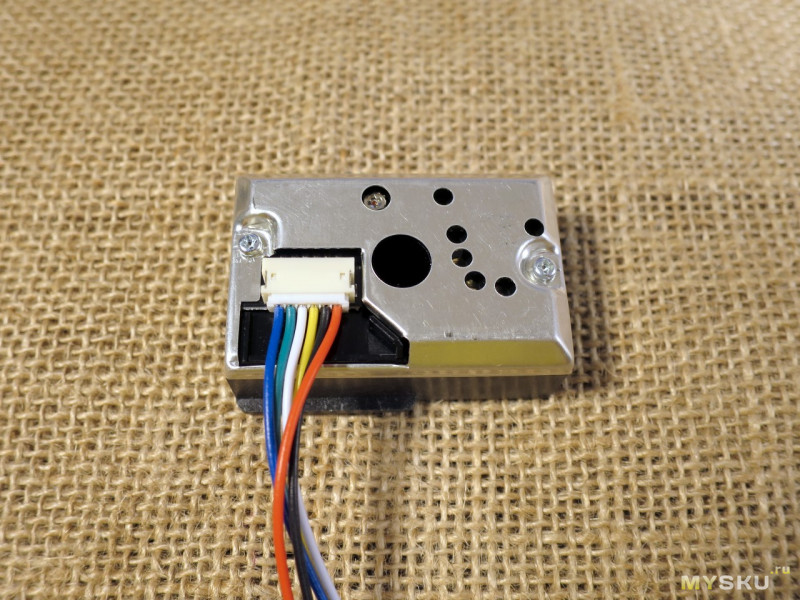
Samyoung DSM501a
Третий датчик для определения пыли он использует тот же метод, что и Шарп, но в отличие от него, данные выдает по двум калибрам пыли — до 2,5мкм и от 2,5 и выше. Для связи передачи данных используется широтно-импульсная модуляция, что немного сложнее обработке, но намного надежнее с точки зрения помехозащищенности, чем аналоговый сигнал.
Его краткая характеристика:
напряжение питания: 4,5-5,5 вольт
потребляемый ток: 90ма
минимальный размер обнаруживаемой пыли: 1мкм
диапазон измерений: 0-1400 мкг/м3
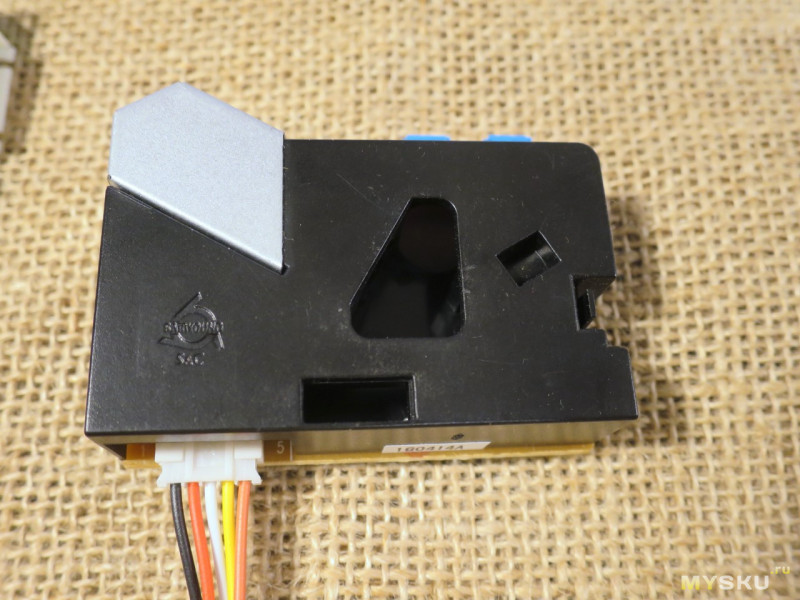
У этого датчика есть выход, который используется для регулировки чувствительности второго канала. Таким образом, мы можем менять границу разделения пыли на две фракции. Для улучшения циркуляции воздуха используется микро-печка из резистора, которая нагревает воздух и за счет конвекции он быстрее обновляется у сенсора.

Разумеется, фаворитом соревнований является лазерный датчик. Он и дороже и современнее своих конкурентов. Мне его прислали бесплатно, на обзор, и, как многие думают, я его должен хвалить уже из-за этого. Это не так, но сказать пару хороших слов можно сразу, едва вынув датчик из упаковки. Его легко подключить к компьютеру через прилагаемый переходник, скачать программу снятия данных и вуаля! График пыли строится на вашем экране.

Программа у меня провисела в фоне несколько дней, прежде чем я занялся сравнением датчиков, и уже в эти дни я понял, очень мало я знаю о пыли в своем доме.
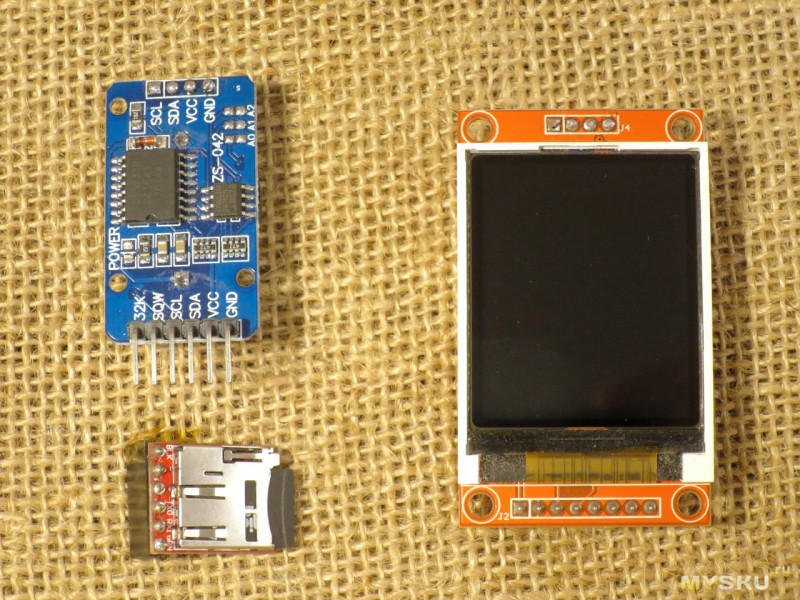
И конечно же Arduino Pro Mini — мозг и память всего проекта.
В качестве переходного звена, объединяющего все элементы, будет макетная платка. В основном на ней разъемы для подключения датчиков, но еще имеются резистор и электролитик — они требуются для нормального функционирования датчика Sharp.
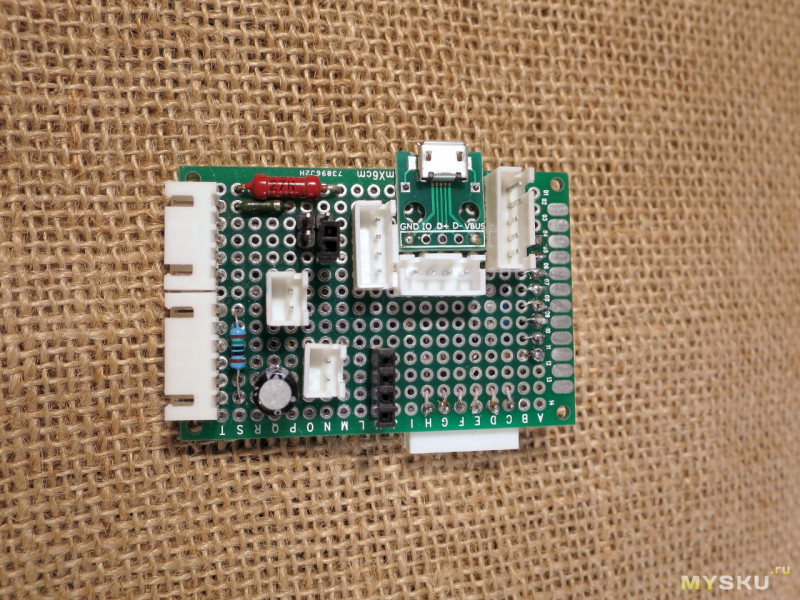
Два резистора с джамперами — они служат для переключения порога чувствительности второго канала датчика DSM501, разъем микро-usb для питания в отсутствии компьютера и линейка резисторов для безопасного подключения экрана.
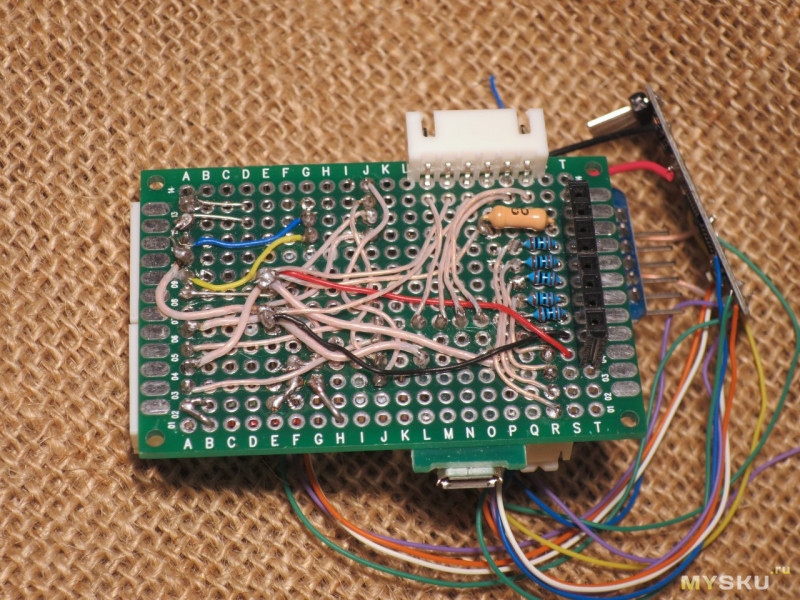
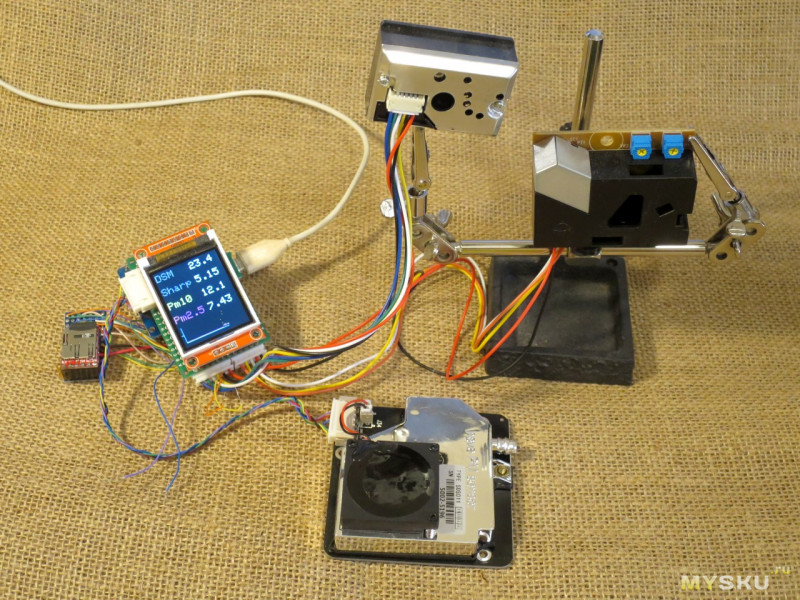
Вот что у меня получилось в результате.
Первым делом я решил протестировать датчик фирмы Sharp. Аналоговый выход обещал легкое подключение и обработку данных. Но все оказалось не совсем так. бОльшую часть времени датчик простаивает. Один раз в 10 мс на датчик нужно подать короткий импульс длительностью 320 мкс, который включит светодиод подсветки пыли. Потом, через 280 мкс, когда на выходе датчика окажется ответный сигнал, нужно успеть его снять и определить его амплитуду. Она-то и характеризует количество пыли в воздухе. Как только сигнал оцифрован, напряжение с подсветки снимается и все отключается до следующего импульса. Конечно, такой алгоритм снижает износ датчика и еще, как упомянуто в мануале, позволяет отличить пыль от дыма. Жаль, там не развивается эта мысль и остается только догадываться, как их отличить на практике.
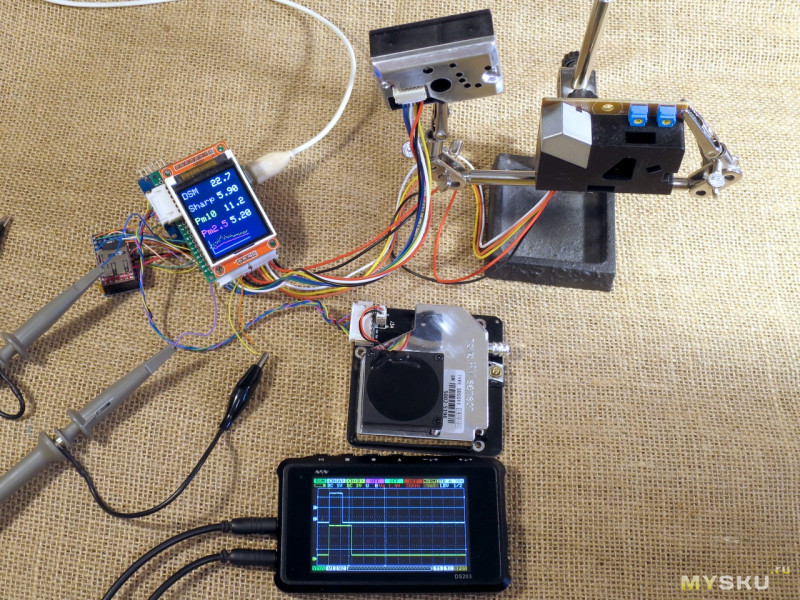
Простым вольтметром сигнал с датчика не померить и пришлось снимать осциллограмму.

Желтый график — управление светодиодом подсветки пыли. Отрицательный сигнал включает диод.
Голубой — ответ датчика.
Фиолетовый я ввел для наглядности, он включается непосредственно перед тем, как контроллер приступает к измерению напряжения сигнала и выключается после того, как напряжение измерено. Что интересно, мы видим, что сигнал от датчика начинает спадать не после отключения диода подсветки, а еще при его работе. Так что в измерениях важно не промахнуться по времени и все точно выполнять по инструкции.
Второй важный момент — грамотно перевести полученные вольты в микрограммы на кубометр. Для этого надо вычесть из сигнала постоянную полку и по графику вычислить концентрацию пыли. Постоянная составляющая сигнала у каждого датчика своя. Все требует настройки.
В демонстрационных программах, которые можно найти на гитхабе, со временем промашка. Чтобы успеть все правильно измерить, нужно приступать уже через 200 мкс после включения диода, а не чрез 280, как там пишут.
delayMicroseconds(200); // was 280, but real 320mks at 200 setting
Итак. Что же мы имеем с гуся? А с гуся мы имеем почти ничего. Показания скачут вокруг нулевых значений. В принципе, это и не удивительно, я пылесошу каждый день. Но хотелось бы меньшего разброса показаний. Если поступить по-варварски и ввести в отверстие датчика какой-то предмет, то показания сразу взлетают на максимум, так что датчик рабочий. Просто для относительно чистой комнаты не очень чувствительный.
Второй датчик тоже заработал не сразу. Халява не прошла, и первый попавшийся в интернете код не заработал. Датчик показывал погоду на Марсе, и пришлось разбираться детально. Для начала я решил исключить плохое питание. Может оно и хорошее, но на всякий случай я припаял между + и — электролитик. Затем, в соответствии с мануалом, надо учитывать только импульсы от 10 до 90 мс. Да, импульсы у этого датчика следуют не с постоянной частотой и скважностью, а хаотично. И программно нужно их суммировать и вычислять процент присутствия импульсов относительно общего времени наблюдения. Так вот, в эту сумму не попадают импульсы менее 10 и более 90 мс. Третье: надо научиться пользоваться настройками датчика. При замыкании провода управления на землю через резистор 18,2КОм первый выход датчика становится столь же чувствительным, как и второй. Что не имеет практического смысла. При замыкании на землю через резистор 47 КОм первый выход начинает видеть пыль только крупнее 1,75 мкм. Таким образом, если в датчик залетит пылинка 1,5 мкм, то на втором выходе будет сигнал, а на первом — нет. При полном отключении управляющего провода от земли первый выход начинает замечать только пыль крупнее 2,5 мкм. Что нам и нужно. Мы снимаем показания со второго выхода, вычитаем их них показания с первого и получаем, таким образом, количество пыли в диапазоне от 1 до 2,5 мкм.
Но это еще не все. Остается перевести длительность присутствия сигнала на выходах датчика в количество пыли. А для этого в нашем распоряжении лишь график. График в программу не засунешь, я нашел онлайн сервис по оцифровке графиков и подбору полиномов для их более-менее точного моделирования. До меня это сделал какой-то парень из Штатов, но там у них свой стандарт, они меряют пыль в пылинках на одну сотую кубического фута. А у нас микрограммы на кубометр. Так что формула из готовых скриптов мне решительно не подходила.
Вот моя формула:
y = -0.088496207228664*x^4 — 2.5505502324503*x^3 — 21.92053783603786*x^2 + 172.17128476610927*x — 90.1119605706346
Где
х — процент времени, когда присутствует сигнал от датчика, 0-100%
y — концентрация пыли, мкг/м3
Формула очень хорошо коррелирует с графиком из датшита, но совсем не коррелирует с действительностью, увы.
После всех этих плясок с бубном ничего сильно хорошего не получилось: датчик показывал то чистейший горный воздух, то тяжелую атмосферу шлифовального цеха.
Удивительно, но если вернуться к старой формуле из примеров использования датчика, той, с штуками пылинок на сотую кубофута, то выдаваемые датчиком значения численно более-менее правдоподобны, для чистой комнаты. Но как только поднимается пыль, они начинают отставать.
А вот лазерный датчик хлопот не доставил. Байты из порта прочитались сразу. Сигнал с ШИМ — выходов тоже равномерный и красивый.

Показания очень хорошо соотносятся с происходящими вокруг датчика событиями. Это было заметно еще по первому включению, с выводом графика на десктоп. Пики в левой части графика — пайка. Датчик лежал на столе, где я паял стенд. По ощущениям, дыма особого не было, но график решительно полз вверх каждый раз, когда я включал паяльник. Короткий всплеск справа — расстилание кровати. Оказывается, даже чистая постель — источник огромного количества пыли.
Еще один неочевидный вывод — хороший пылесос совсем не гоняет пыль по комнате, а действительно ее всасывает. Включение пылесоса совершенно не отражалось на графике. А вот строительный пылесос — совсем другое дело. Мне нужно было просверлить пару небольших отверстий в ванной комнате. Там вытяжка, там маленькие отверстия, но все-таки я подогнал строительный пылесос, чтобы пылью от сверления не портить эксперимент с датчиками пыли. Эффект получился совсем не такой, как я ожидал.

Концентрация пыли мгновенно выросла в 20 раз и спадала потом еще полчаса. Кстати, проветривание резко снижает количество пыли в воздухе. Наверное, не во всех областях это так, но мне вот повезло.
Выводы
Я пару дней гонял стенд с тремя датчиками в разных условиях. В области малых концентраций пыли для измерений годится только лазерный датчик. Он же и самый быстрый на отклик. У меня нет возможностей проверить показания этого датчика. Но мне достаточно того, что в его измерениях отражались все события в комнате, которые так или иначе должны были влиять на пыль. Расстилание кровати, проветривание, пайка, работа пылесоса, ремонтные работы — все это тут же сказывалось на графике. Что до шума от вентилятора, то он не очень большой. И у датчика есть режим энергосбережения, при котором вентилятор не работает. Два других датчика скорее подойдут для контроля относительно грязной атмосферы. Если выбирать из них, то Samyoung DSM 501 выглядит предпочтительнее. Его преимущества — разделение пыли по фракциям, лучшая помехозащищенность, большой диапазон и улучшенная циркуляция воздуха.
Плюсы датчика SDS011
+ высокая корреляция показаний прибора и обстановки с пылью вокруг
+ стабильность показаний
+ скорость реакции
+ невысокая (для лазерных датчиков) стоимость.
Минусы датчика SDS011
— шум от вентилятора
— относительно высокое энергопотребление
Обновление от 24.05.19
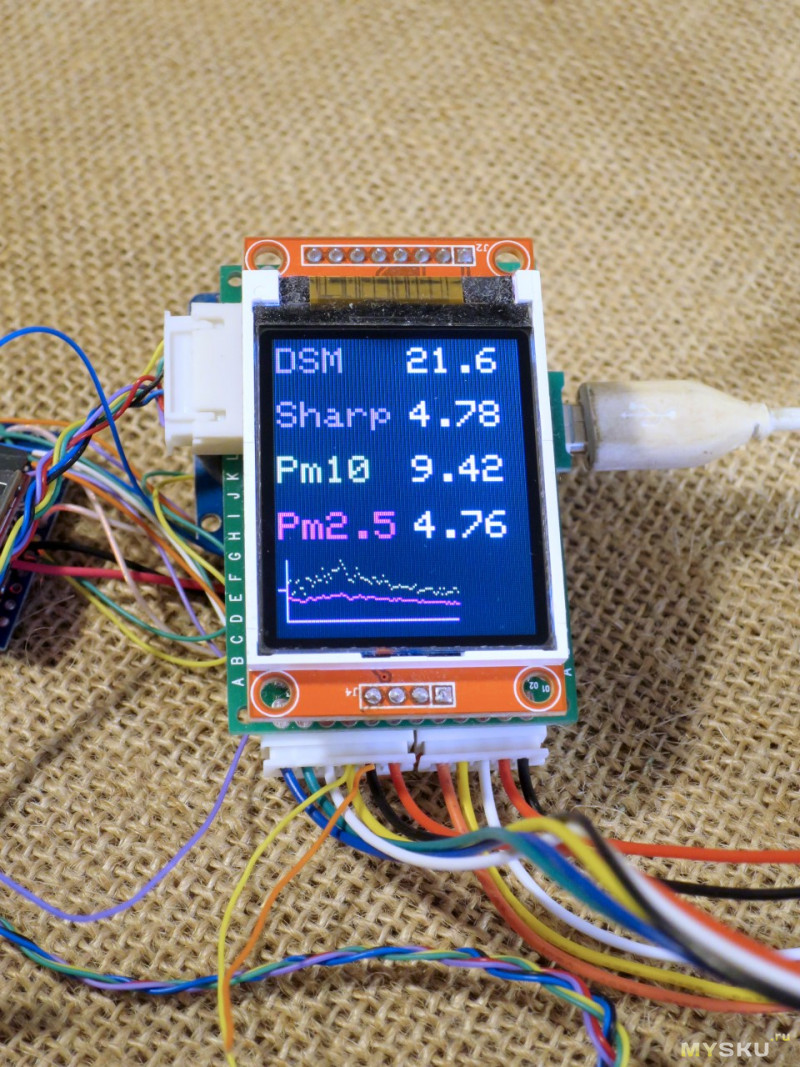
В итоге, для постоянной работы я оставил один только датчик пыли — разумеется SDS011. У него обнаружилась полезная особенность. Для экономии электричества и ресурса он может работать в перывистом режиме — заданный период он ожидает, потом включается на 30 секунд, измеряет концентрацию пыли и выдает ее в порт. Потом снова засыпает. Еще одна полезная настройка — датчик может самостоятельно посылать данные в порт, а может ждать запроса от контроллера. Мне показалось, что 30 секунд недостаточно, чтобы датчик вышел на стабильные показания, так что я провел серию экспериментов. В скетч добавил режим, в котором датчик принудительно включается и выключается. Пробовал запускать его на минуту и две, регулярно опрашивать и усреднять показания. В итоге оказалось, что как раз-таки 30 секунд — оптимальный период работы.
В новой версии скетча добавлен автоматический режим, когда датчик сам включается и выключается, и ручной. Добавлены шкалы на графике. В итоге экран прибора выглядит примерно так:

Робот пылесос уже давным-давно не относится к каким-то инновациям и для многих стал привычным атрибутом домашней бытовой техники.
Удобно, когда вместо тебя кто-то без напоминаний и скандалов убирает от мусора квартиру.
В современных дизайн проектах иногда даже упоминается обязательное требование доступности уборки при помощи робот-пылесосов!
Только не забывайте, что в первую очередь это устройство для ПОДДЕРЖАНИЯ чистоты, и его наличие в квартире никоим образом не отменяет необходимость генеральной уборки.


У вас конечно исчезнет, так называемый накопительный мусор, но забыть про швабру все равно не получится.
В данной статье мы рассмотрим, чем хорошие модели должны отличаться от не очень хороших, и на каких параметрах в первую очередь стоит делать акцент при покупке.

Какого производителя выбрать?
На самом деле нет. Здесь действует универсальное правило, которое применимо и к другим сферам нашей жизни.

Потому что робот пылесос в первую очередь должен быть РОБОТОМ. Яркий пример – продукция компании IRobot.
Вот типичные отзывы от реальных пользователей.


У других известных фирм, которые славятся прежде всего своими холодильниками, варочными панелями или духовками, нет того уровня ресурсной базы, наработок и самое главное — специалистов в этой конкретной области.
Да, у них тоже получаются достойные экземпляры, но самыми лучшими от этого они не становятся. Вы просто переплачиваете за бренд.
Какой мощности должен быть робот-пылесос? В характеристиках можно найти две величины.
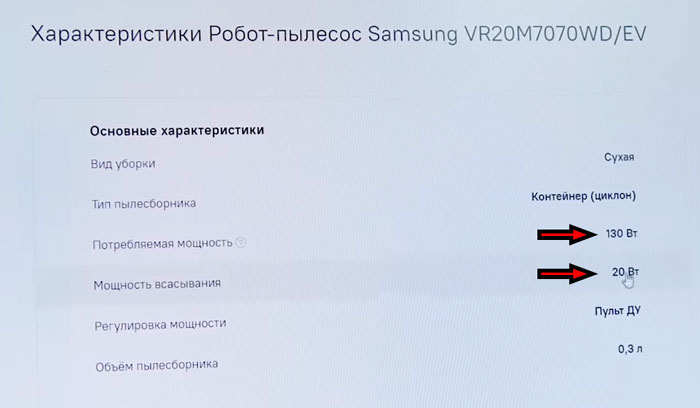
Потребляемая мощность говорит о том, сколько эл.энергии “скушает” прибор после каждой зарядки и сколько по итогу киловатт в конце месяца намотает эл.счетчик.

А вот мощность всасывания (или объемная скорость потока воздуха) — это совсем другое дело. Именно она отвечает за то, насколько хорошо пылесос будет затягивать воздух и всю пыль вместе с ним.
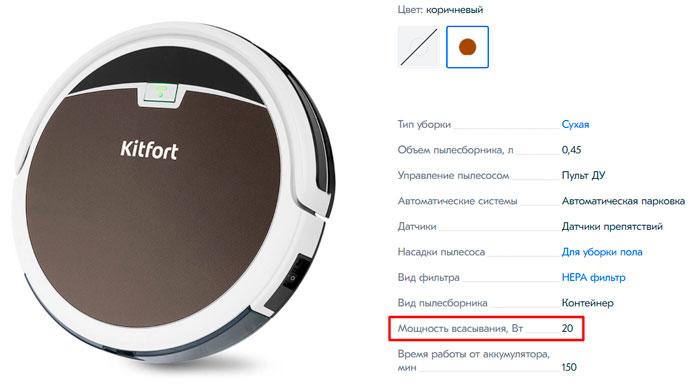
Оптимальное значение всасываемой мощности – 35-40 “аэро” ватт. 20-25Вт все-таки маловато.
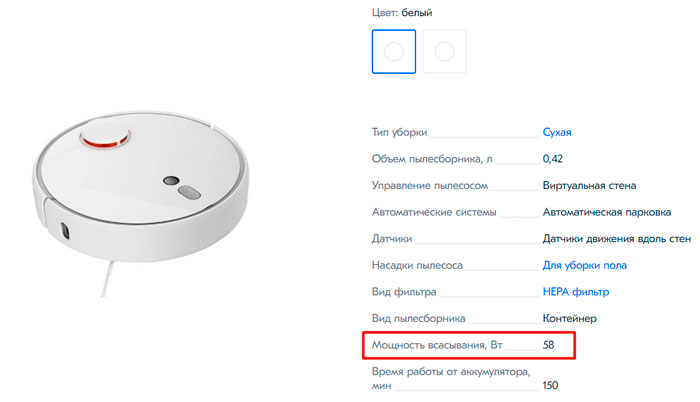
Для того, чтобы с легкостью справляться с шерстью и волосами в паласах и коврах, потребуется уже более 40Вт.
В некоторых характеристиках этот параметр указан в Паскалях. Он показывают перепад давления на входе.
Сахар или соль из ковра он уже не достанет. Он даже не сможет очистить глубокие швы между плиткой и ламинатом.
Традиционные пылесосы гиганты имеют мощность всасывания от 200 до 500Вт. Казалось бы, на что вообще способна кроха с 40Вт на борту?

И здесь все почему-то забывают про высоту подъема мусора. Дело в том, что маленькому “блинчику” вовсе не нужно прогонять пыль по длинной гофрированной трубке.
Поэтому 40Вт ему будет более чем достаточно, чтобы приподнять мусор на пару сантиметров от пола и затянуть его во внутрь себя.
Все традиционные модели изначально имели круглую форму.
Но многие уверены, что круглый робот намного хуже справляется со своими обязанностями, чем новомодные пылесосы D-формы (квадратные).


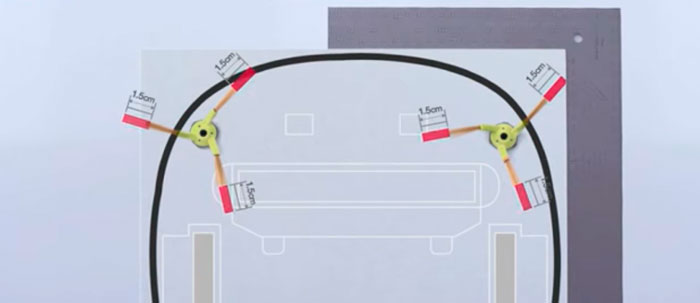
Да, действительно, квадратный вычищает углы немножко эффективнее. После него мусор остается в радиусе не более 1см со стороны внутреннего угла. У круглого – чуть более 2см.

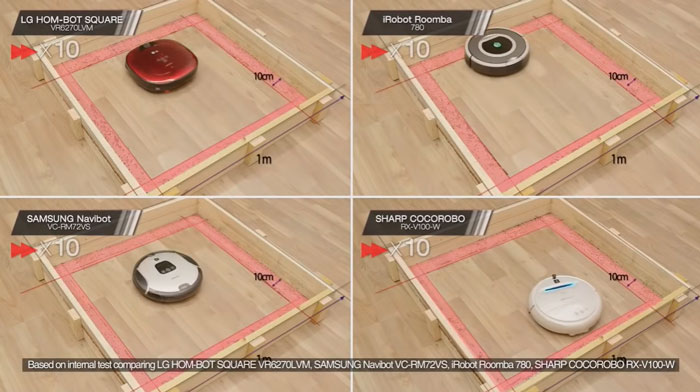
Вот результаты теста трех круглых роботов и одного квадратного собрата, проведенные в идеальных условиях (рассыпанный по углам и краям мусор в замкнутом прямоугольнике).
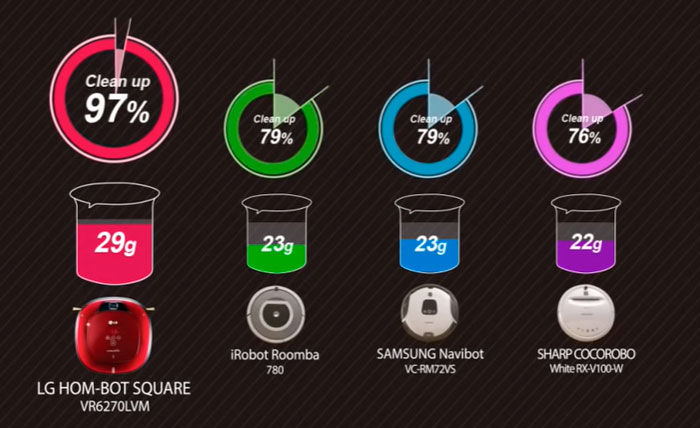
D-робот победил с завидным преимуществом.

Однако посмотрите на свои комнаты и задайтесь вопросом, а сможет ли робот добраться до этих самых углов? Чаще всего они заставлены какой-то мебелью, предметами обихода, трубами батарей и т.п.
Поэтому в 90% случаев никакой робот попросту туда не доедет, а значит и делать акцент на квадратной форме не стоит. Кроме того, круглый имеет и ряд преимуществ:

После заезда в угол ему не нужно сдавать назад, чтобы развернуться.
Эффективность уборки в углах у него решается более простыми способами:
Существует две разновидности щеток, которыми аппарат захватывает мусор.

Сколько боковых щеток должно быть у хорошего робот-пылесоса?
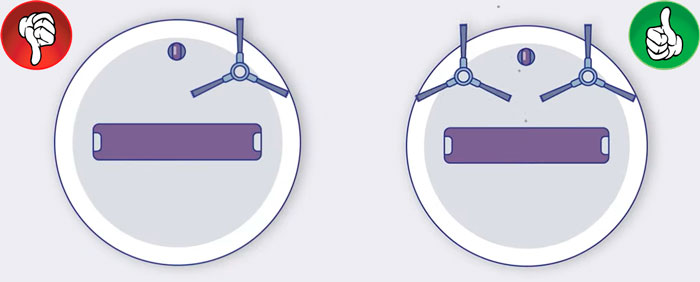
Вовсе нет. Ведущие производители обычно ограничивается всего одной! В первую очередь она нужна при уборке вдоль плинтусов и углах комнаты.
Те, кто ставит по две, объясняют это необходимостью большего захвата очищаемой площади за один проход. На самом деле при хорошей навигации большой роли это не играет.
При передвижении змейкой поверхность одинаково очищается как с одной, так и с двумя щетками. Важнее всего обратить внимание на ИСПОЛНЕНИЕ боковых щеток.

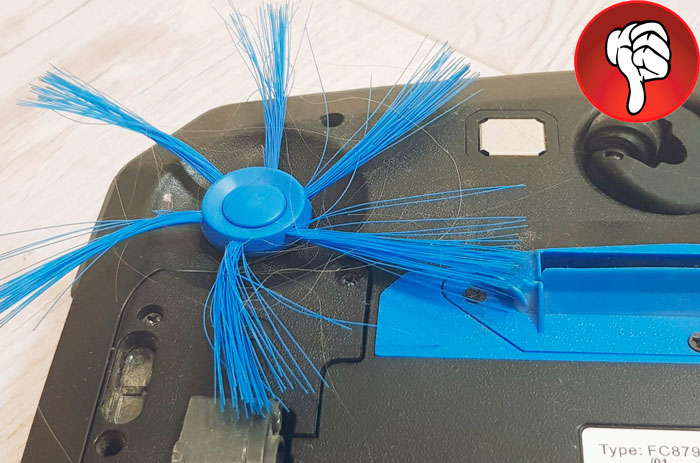

Дело в том, что такие кисточки получаются менее упругими, быстро деформируются и начинают хуже собирать мусор в углах. Ворс должен занимать максимум половину длины.

Самый лучший вариант по износостойкости – силиконовые пятилучевые.
На коврах они однозначно проигрывают ворсу.
Снизу посредине корпуса робота располагается либо отверстие для всасывания воздуха, либо турбощетка. Именно она и является главным уборщиком.

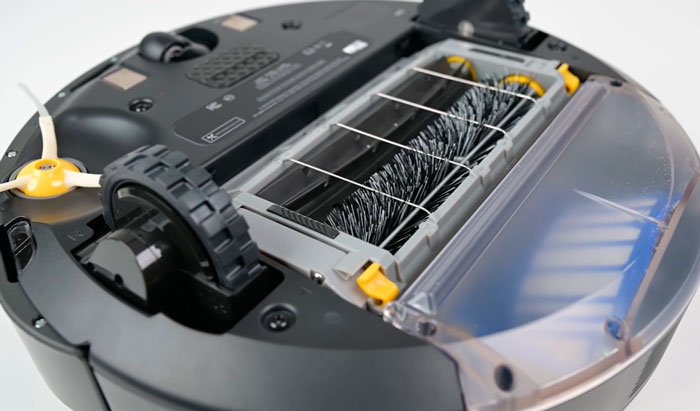

Боковые щетки всего лишь разбрасывают и направляют частички мусора в заданном направлении. Всю основную работу делает центральный воздухозаборник, либо валик с щетиной.
Воздухозаборник подходит только для работы на твердых полах – кафель, линолеум, паркет.
Валик же хорошо собирает мусор, шерсть от домашних животных и длинные волосы на любых поверхностях. Даже с головы, если вы случайно уснули на полу 😊


Без турбощетки практически невозможно нормально очистить ковры и паласы с мелким и средним ворсом.
Производители каждый раз пытаются усовершенствовать центральную щетку, внедряя все новые и новые конструктивные решения. Поэтому обратите внимание – валик валику рознь!



Вот например, валики-скребки от компании IRobot.

Они изготавливаются из силикона и при работе вращаются в разных направлениях.

Так как это запатентованное решение и IRobot был первопроходцем в этом деле, все другие производители вынуждены изобретать свои щетинисто-лепестковые варианты.
Главный недостаток щетины – запутывание и застревание в ней волос и шерсти, хотя и валики этим зачастую грешат.



Поэтому крайне желательно, чтобы щетка была разборной с двух сторон и имела съемные боковые наконечники.

За ориентацию электронного помощника в пространстве отвечают датчики и камера (в зависимости от функционального оснащения). На основе сигналов от сенсоров происходит построение кратчайшего пути до нужной точки, а также выявление преград, подсчет пройденного расстояния и т.д. Когда эти элементы загрязняются, работоспособность девайса нарушается. Поэтому каждый пользователь робота-пылесоса должен знать, как почистить датчики, ведь в этом нет ничего сложного.
Где на роботе-пылесосе находятся датчики
Прежде чем приступить к уборке, нужно понять, где находятся эти элементы. Как правило, ИК-сенсоры располагаются на передней части устройства (бампере), что позволяет обходить препятствия (стены, мебель) и не врезаться в них. На многих моделях, в том числе и Xiaomi, сенсоры установлены со всех сторон робота.

Также есть гаджеты, у которых датчик расположен в верхней части корпуса: он определяет, сможет ли пылесос проехать под мебелью. А у некоторых моделей элементы стоят снизу, что определяется функционалом.
Расположение сенсоров в зависимости от типа:
- По периметру нижней части прибора установлены датчики перепада высоты.
- Ультразвуковые элементы можно увидеть через окошки в передней части.
- Обзорная камера стоит на передней панели.
Каким образом очистить датчики на роботе-пылесосе
Если ваш помощник стал близко подъезжать к мебели, ударяться о нее или другие предметы, то это указывает на необходимость осмотра и очистки сенсоров. Какой бы идеально чистой не была поверхность пола, но со временем загрязняется не только сам прибор, но и его датчики. Причем на последних может собираться на удивление довольно толстый слой пыли, который препятствует нормальной работы девайса. В этом случае датчики робота-пылесоса Xiaomi или любого другого, необходимо почистить.
Процедура проста, но требует аккуратности. Многие пользователи ограничиваются протиркой корпуса в местах установки сенсоров сухой и мягкой тряпочкой. Такие советы нередко можно встретить в сети.
Внимание! Объектив камеры следует протирать с особой аккуратностью без какого-либо усилия. Также не стоит использовать химические средства.
Однако такая процедура помогает далеко не всегда, поскольку спереди элементы установлены за защитным стеклом и для их очистки необходимо снять сам бампер. Именно в зазор между панелью и корпусом попадает много пыли. В этом случае требуется демонтировать переднюю панель, не забывая разъединить разъем, и тщательно очистить окошки и сами сенсоры от пыли. Для этого используется пылесос и мягкая кисточка. Когда пыль будет удалена, производится обратная сборка.

Если после проделанной работы гаджет по-прежнему плохо ориентируется в пространстве, бьется о стены и в целом всем своим поведением указывает на проблемы в работе, стоит обратиться за помощью в сервисный центр. Вероятнее всего возникли проблемы с самими сенсорами, которые нуждаются в проверке, а может и замене. Такую работу обычный пользователь выполнить не сможет.
Процедура чистки датчиков на роботе-пылесосе Xiaomi – необходимая мера для нормальной работы девайса, которую может сделать каждый без обращения за посторонней помощью. Осматривать сенсоры рекомендуется хотя бы раз в месяц, а может и реже, ведь все зависит от степени загрязнения пола и частоты уборки.
Читайте также: