
Как сделать щетки для робота пылесоса
Обновлено: 14.05.2024

Системы робота-пылесоса
Под внешними панелями робота-пылесоса заключено сразу несколько систем, обеспечивающих его функциональность:

- система перемещения в пространстве, состоящая из двух ведущих колес и одного ведущего ролика, во многих моделях выступающего в качестве датчика для подсчета пройденного пути;
- система сбора мусора, в нее входят основная и дополнительные щетки, непосредственно отвечающие за уборку;
- система фильтрации, очищающая от пыли воздух, который проходит через внутренности пылесоса;
- система датчиков, которые отвечают за ориентирование робота в пространстве и обеспечивают его безопасность.
Работу системы датчиков оставим за рамками материала, поскольку она подробно описана в другой статье блога.
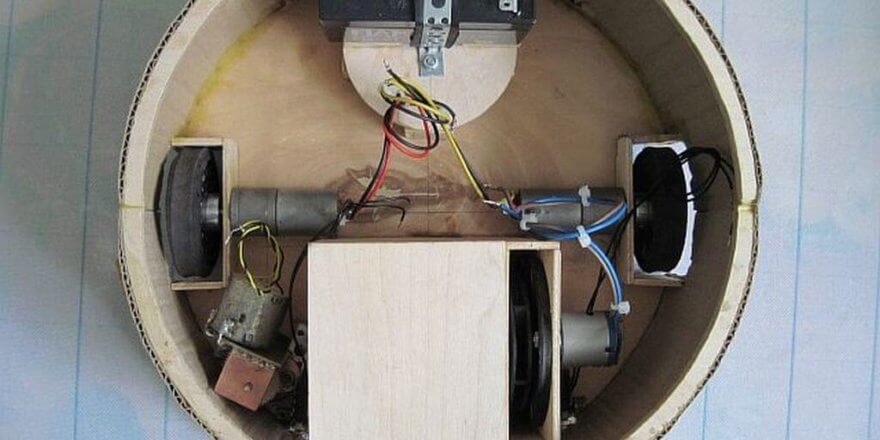
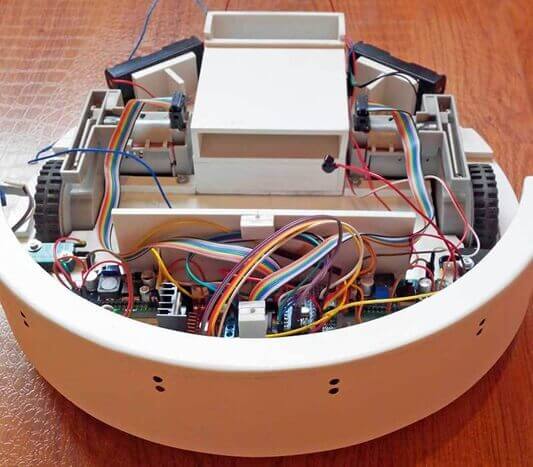
Устройство и расположение основных функциональных узлов робота-пылесоса представлено на следующем рисунке.

Вне зависимости от производителя и модели, такое строение умного помощника является типовым, и встречается практически у всех роботов-пылесосов. Отличия незначительны и не играют какой-либо определяющей роли. Далее рассмотрим назначение каждого компонента отдельно.
Плата управления
Во многих моделях роботов-пылесосов на плате управления можно встретить два микропроцессора. Один отвечает за работу исполнительных механизмов, второй — за обработку параметров датчиков, объединенных в систему ориентирования в пространстве.
Аккумулятор
Роботу-пылесосу необходима определенная автономность. Ее обеспечивает аккумулятор, встроенный в корпус. Как правило, такие пылесосы оснащают литий-ионными аккумуляторами, поскольку они обладают малым весом и достаточной емкостью. В зависимости от производителя и модели, емкость аккумуляторного блока может составлять от 1200 мА*ч до 4500 мА*ч и выше.
Пополнение энергией происходит на базовой станции, когда робот-пылесос находится в состоянии покоя. Если он полностью израсходует энергию во время уборки, будет активирован алгоритм возвращения на базу для немедленной подзарядки.

Мотор-колесо
В роботе-пылесосе установлено два мотор-колеса, служащих для перемещения девайса в пространстве. Мотор-колесо — отдельный самостоятельный узел, включающий в себя электродвигатель и редуктор.
В упрощенном понимании, редуктор уменьшает обороты двигателя, но, в то же время, увеличивает вращающий момент, прилагаемый к оси вращения колеса. Это необходимо для того, чтобы снять излишнюю нагрузку с вала электромотора и получить приемлемые характеристики скорости и проходимости робота-пылесоса.
Оба мотор-колеса работают автономно друг от друга, получая отдельные команды от платы управления. Независимая работа ведущих колес обеспечивает автономному уборщику потрясающую маневренность.
Роботу-пылесосу не составит труда развернуться на месте, что очень важно в тесном помещении, заставленном мебелью.
Проходимость девайса напрямую зависит от диаметра ведущих колес. Чем они больше, тем проще роботу-пылесосу преодолевать пороги и перемещаться по коврам с высоким ворсом.
Боковые щетки

Задача метелок — сметать мусор, попадающийся на пути пылесоса, в зону работы основной щетки, а также извлекать сор из труднодоступных мест (углов помещения, пространства вдоль плинтусов и т. д.).
Основная щетка (турбощетка)
Основной узел робота-пылесоса, который отвечает непосредственно за уборку помещения. Конструкция турбощетки может включать один или два специальных вала для уборки загрязнений. Для большей эффективности валы дополнены щетиной из натурального или синтетического материала и силиконовыми вставками, предназначенными для уборки мелкого мусора.

Во время движения робота-пылесоса турбощетка постоянно вращается, подхватывает соринки с напольного покрытия и отправляет их в контейнер для сбора мусора.
Если турбощетка оснащена двумя валами, они вращаются во встречном направлении по отношению друг к другу, что повышает эффективность уборки.
Электродвигатель пылесборника
Создает воздушный поток внутри корпуса. Направленное движение воздуха заставляет частички мусора и пыль с ворсинок турбощетки двигаться в сторону пылесборника. Для этого в районе валов основной щетки установлен всасывающий раструб, через который происходит забор пыли с поверхности турбощетки.

При вращении лопастей крыльчатки под корпусом робота-пылесоса создается небольшое разрежение, способствующее более эффективному всасыванию мусора, после чего потоком воздуха его направляет в пылесборник.

Вопреки устоявшемуся мнению, воздушный поток, создаваемый лопастями крыльчатки, играет второстепенную роль в уборке. Он помогает собранным частичкам гарантированно оказаться в пылесборнике. Основную скрипку в сборе мусора играет турбощетка.
Именно по этой причине в системе всасывания пыли не нужен мощный электродвигатель. Как правило, мощность мотора, который устанавливают в роботы-пылесосы, редко превышает 40–65 Вт. Этого вполне достаточно для эффективной уборки.
Отсек для мусора и система фильтрации
К отсеку для мусора не предъявляется особых требований. Главное, чтобы он был вместительным и удобным в обслуживании, ведь несмотря на всю автономность робота-пылесоса, чистить контейнер от пыли придется пользователю. Как правило, емкость отсека составляет 0,4-1 л. Чем он больше, тем реже придется его чистить.
А вот система фильтрации заслуживает отдельного внимания, особенно если кто-то в доме подвержен аллергическим реакциям. По сути, система фильтрации — это набор преград, очищающих проходящий внутри корпуса поток воздуха. Чем меньше ячейки фильтров, тем лучше он очищается и тем более чистым возвращается в помещение.
Резюме

Как видим, в устройстве робота-пылесоса нет ничего сложного, но все же, согласитесь, его конструкция кардинально отличается от прототипов, придуманных иллюстраторами к фантастическим рассказам. Сегодня такое внутреннее строение робота-пылесоса считается оптимальным, а какими они станут в будущем — покажет время.
В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
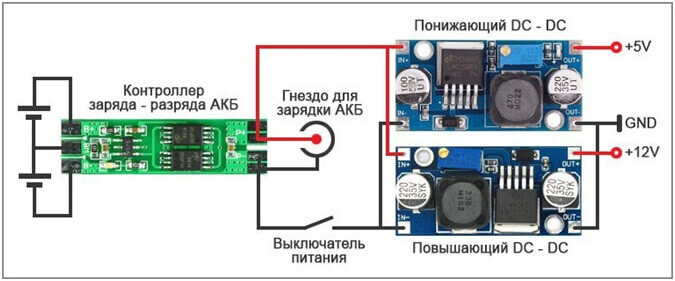
- Аккумуляторы и контроллер заряда.
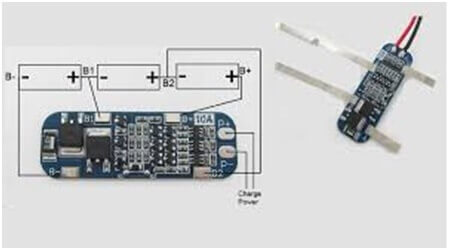
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
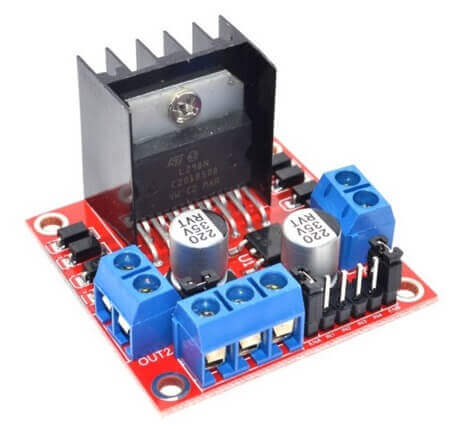
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.


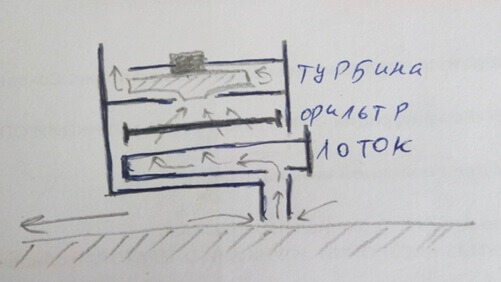
Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.

Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
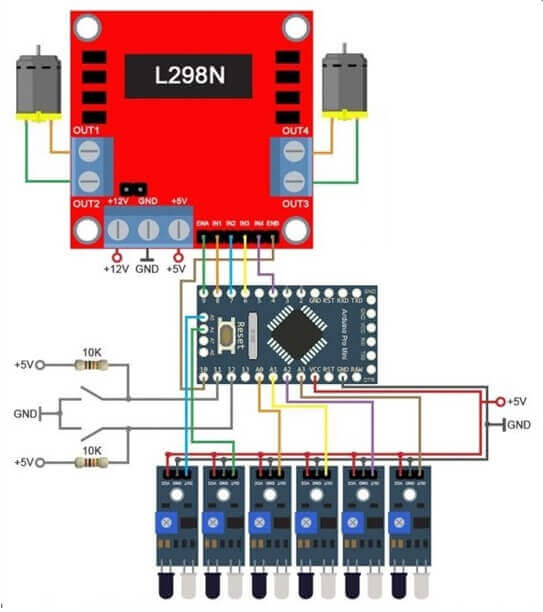
Схема сборки робота-пылесоса
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.

Вот схема питания этого робота:
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Ритм жизни современного человека становится все более насыщенным и в его плотном графике становится все меньше времени на уборку собственного дома. В связи с этим в последнее время появляется все больше устройств, упрощающих наведение порядка в доме, одними из которых являются роботы-пылесосы, позволяющие в автоматическом режиме производить уборку пола в помещениях. У этих роботов-пылесосов достаточно много достоинств, но их существенным недостатком, сдерживающим их широкое распространение, является цена. Поэтому в данной статье мы рассмотрим создание робот-пылесоса на основе платы Arduino, который по функциональности будет мало отличаться от коммерческих моделей роботов-пылесосов, но стоить будет существенно дешевле них.

В составе робота мы будем использовать ультразвуковые датчики и инфракрасный датчик (IR proximity sensor). Ультразвуковые датчики будут помогать роботу избегать столкновения с препятствиями во время уборки помещения, а датчик приближения будет предотвращать падение робота с лестниц.
Ранее на нашем сайте мы уже рассматривали проект чистящего робота пылесоса на основе Arduino, но он был недостаточно совершенным и очень громоздким. Рассматриваемый в данном проекте робот-пылесос значительно более компактный и отличается более интеллектуальным алгоритмом работы. Также на нашем сайте вы поможете посмотреть похожие проекты роботов на основе платы Arduino:
Необходимые компоненты
- Плата Arduino Pro Mini (купить на AliExpress).
- Ультразвуковой датчик HC-SR04 – 3 шт. (купить на AliExpress).
- Драйвер двигателей L293d (купить на AliExpress).
- Электродвигатели постоянного тока формата N20, работающие от 5 В, с кронштейнами для их установки – 2 шт. (купить на AliExpress - смог найти только на 6 В, на 5 В почему то не удалось найти).
- Переключатель.
- Регулятор напряжения LM7805 (купить на AliExpress).
- Литий-ионная батарея 7.4V (купить на AliExpress).
- Инфракрасный датчик (купить на AliExpress).
- Перфорированная плата.
- Опорный ролик (колесо) для робота.
- MDF (из него будет делаться корпус робота).
- Портативный вакуумный пылесос (Vacuum Cleaner).
Внешний вид компонентов, необходимых для сборки данного робота-пылесоса, показан на следующем рисунке:

Портативный пылесос (Portable Vacuum Cleaner)
Для того, чтобы наш робот мог выполнять свою функцию по предназначению (то есть пылесосить помещение), в его составе должен быть портативный пылесос. Внешний вид подобного пылесоса показан на рисунке ниже. Этот пылесос имеет очень простой механизм. Он имеет три части внизу – небольшую камеру для сбора пыли, двигатель постоянного тока и вентилятор. Сверху пылесоса имеется контакт для подключения питания. Двигатель непосредственно запитывается от напряжения 3V (2 батарейки по 1,5 В формата AA) через простой выключатель. Поскольку мы будем запитывать все наше устройство от литий-ионной батареи 7.4V, мы можем отрезать провода пылесоса от его внутреннего источника питания и запитать его от напряжения 5V с нашей схемы. Таким образом, мы удалили все ненужные нам внутренности пылесоса и он стал выглядеть внутри так, как показано на следующем рисунке.

Ультразвуковой датчик HC-SR04

Для обнаружения роботом препятствий в нашем проекте мы будем использовать популярные ультразвуковые датчики HC-SR04. Принцип их работы достаточно прост: передающий модуль датчика излучает ультразвуковую волну, которая распространяется в окружающем пространстве, отражается от препятствия и улавливается (принимается) приемным модулем датчика, в результате чего на выходе датчика формируется импульс, равный времени распространения ультразвуковой волны до препятствия и обратно. Зная скорость распространения звука в воздухе, достаточно просто на основе этого времени определить расстояние до препятствия. Более подробно об определении расстояний с помощью данного ультразвукового датчика и платы Arduino можно прочитать в этой статье. Также на нашем сайте вы можете посмотреть все проекты, в которых для определения расстояния использовался ультразвуковой датчик HC-SR04.
Инфракрасный датчик для обнаружения лестниц
Для того, чтобы наш робот-пылесос мог обнаруживать лестницы и не падать с них, мы будем использовать инфракрасный датчик (IR Sensor). Принцип его действия достаточно прост – он содержит в своем составе излучающий инфракрасный диод (IR LED) и фотодиод. Излучающий инфракрасный диод излучает инфракрасный свет и если на его пути встречается препятствие, то он отражается от него и улавливается (принимается) фотодиодом. Но напряжение на выходе фотодиода достаточно мало, поэтому для его усиления до необходимого уровня в составе датчика содержится компаратор на основе операционного усилителя.

Инфракрасный датчик содержит 3 контакта – Vcc (питающее напряжение), ground (общий провод, земля) и output (выход). Когда вблизи датчика есть препятствие, то на его выходе формируется напряжение низкого уровня (low). Поэтому данный датчик мы можем использовать для обнаружения пола комнаты. Если он передвигается по полу, то на выходе датчика будет low. Если же на выходе датчика мы неожиданно обнаружим напряжение высокого уровня, то мы должны либо остановить робота, либо двигать его в обратном направлении, либо сделать что-либо другое чтобы предотвратить его падение с лестницы.
Схема проекта
Схема робота-пылесоса на основе платы Arduino представлена на следующем рисунке.

Для обнаружения препятствий мы в схеме робота используем три ультразвуковых датчика. Их контакты питания подключены к общему питанию схемы, а земля – к общему проводу схемы. Управляющие (trigger) и выходные контакты (echo pins) датчиков подключены к ШИМ (широтно-импульсная модуляция) платы Arduino. Инфракрасный датчик также запитывается от общих VCC и земли (ground) схемы, а его выходной контакт подключен к цифровому контакту D2 платы Arduino. У драйвера двигателя мы два его контакта, разрешающих его работу (enable pins), подключили к 5 В, также контакт подачи питающего напряжения мы подключили к 5 В поскольку мы используем электродвигатели, работающие от напряжения 5 В. Поскольку наш робот-пылесос запитывается от литий-ионной батареи напряжением 7.4 В, а все компоненты схемы питаются от напряжения 5 В, то для преобразования напряжения 7.4 В в напряжение 5 В мы используем регулятор напряжения LM7805.
Сборка конструкции робота
Для спайки компонентов между собой мы использовали перфорированную плату. Эта часть работы очень проста, но к ней все равно необходимо отнестись с тщательностью. Для подключения платы Arduino pro mini мы использовали два контакта типа "мама" (female headers). После того как мы закончили пайку на перфорированной плате мы использовали соединительные провода для подключения ультразвуковых датчиков.
Изготовление корпуса для робота-пылесоса
Мы решили сделать наш робот-пылесос круглой формы как и большинство современных коммерческих моделей роботов-пылесосов. В качестве материала для изготовления корпуса робота мы решили использовать MDF поскольку он достаточно прочный и имеет неплохую влагозащищенность. Разумеется, вы можете выбрать другой материал, какой вам больше по душе.
Для изготовления корпуса робота мы вырезали из MDF круг радиусом 8 см, а в нем отверстие радиусом 4 см – в него будет вставляться наш портативный пылесос. Также мы вырезали соответствующие отверстия под колеса и три небольшие отверстия для установки опорного валика (колеса). Далее мы установили двигатели с помощью кронштейнов, колеса и опорное колесо. Затем мы установили ультразвуковые датчики слева, справа и спереди робота. Также мы закрепили инфракрасный датчик снизу робота. И не забудьте установить в корпус робота выключатель питания. На следующем рисунке вы можете визуально посмотреть описанную последовательность шагов по сборке корпуса робота.

Для изготовления верхней части робота мы вырезали круг радиусом 11 см. Для скрепления верхней и нижней частей робота и обеспечения необходимого промежутка между ними мы использовали три пластиковых трубы длиной 4 см. Всю конструкцию мы скрепили с помощью клея. При желании боковые стенки робота вы можете изготовить из пластика или какого-нибудь другого материала.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы кратко рассмотрим его основные фрагменты.
В коде программы мы не будем использовать никаких внешних библиотек, поскольку взаимодействие с датчиком HC-SR04 осуществляется достаточно просто. Первым делом в программе мы объявим переменные для взаимодействия контактами Echo и Trigger ультразвуковых датчиков. Первый датчик у нас стоит слева робота, второй – спереди, а третий – справа робота.

Что такое робот-пылесос
Робот-пылесос — бытовой прибор для уборки дома или квартиры при минимальном участии человека (или вообще без него). Девайс работает на аккумуляторе, который заряжают на специальной базе (она идет в комплекте и подключается к обычной розетке). Колеса и датчики позволяют пылесосу перемещаться по помещению, обходить препятствия и собирать мусор во внутренний контейнер. В зависимости от модели, прибор может обладать и другими функциями, например, выполнять влажную уборку или передавать изображение с камеры на телефон хозяина.
В 1997 году Electrolux продемонстрировала прототип первого робота-пылесоса, а в 2002 году первый девайс поступил в продажу. Одновременно со шведской компанией своего помощника представила американская фирма iRobot.

Как работает робот-пылесос
Главная задача робота-пылесоса — поддерживающая сухая уборка. Он собирает до 90% мусора, но для чистоты в квартире хотя бы раз в неделю все равно придется браться за швабру. Ни один робот из представленных сейчас на рынке не очистит квартиру так, как это сделает человек. Но с участием робота человеку придется убираться меньше — главное, настроить устройство для регулярной сборки мусора, и своевременно чистить щетки и пылесборник.
Режимы, в которых может работать робот-пылесос
Фильтр
Робот-пылесос оснащен фильтром тонкой очистки — электростатический или НЕРА (воздушный фильтр с высоким удержанием частиц), который удаляет из воздуха мельчайшую пыль, аллергены и микроорганизмы.
Камера
Встроенные камеры позволяют прибору строить карту помещения и рассчитывать лучшую траекторию движения, а некоторые модели даже передают изображения на смартфон. Эти опции есть не в каждой модели.
Датчики
- Датчик загрязнения анализирует состояние помещения и выбирает интенсивность уборки.
- Оптический, инфракрасный и ультразвуковой датчики помогают пылесосу избегать столкновений, не наезжать на провода и обходить стороной лестницы. Кстати, из-за датчиков некоторые устройства отказываются заезжать на черный пол, воспринимая его как перепад высот. Обхитрить умную технику не составит труда: если в помещении нет критичных перепадов, датчики можно заклеить.
- Лазерный датчик делит пространство на участки, чтобы уборка стала равномерной.
Таймер
С его помощью можно установить время и/или дни для уборки.
Док-станция

Робот-пылесос сам построит карту помещения и будет обходить ее по расписанию, которое можно настроить в приложении (Фото: shutterstock)
Плюсы роботов-пылесосов
- Такой пылесос убирает дом самостоятельно, экономит время.
- Не только собирает пыль, но и выполняет влажную уборку.
- Компактный, не занимает много места.
- Работает по расписанию. Можно один раз выбрать программу, и он будет начинать уборку в определенное время, даже если владелец дома сам о ней забыл.
- Не требует дорогих комплектующих (щеток и фильтров).
- Запчасти к такому пылесосу стоят относительно недорого.
- Он прост в эксплуатации: нужно лишь регулярно вытряхивать контейнер с пылью, доливать воду, чистить щетки.
- Пылесос сам предупредит, когда контейнер наполнится, а когда следует долить воду.
- Разобраться в настройках и приложении для работы робота-пылесоса нетрудно, обычно управление делают интуитивно понятным.
- Способен поддерживать чистоту в отсутствие хозяев длительное время. Можно уехать в отпуск и вернуться в чистую квартиру.
- Некоторые модели позволяют подключиться к камере робота через смартфон и проверить, что происходит, когда хозяев нет дома.
- Маневренный, забирается под диван и шкафы.
- Хорошо помогает от шерсти домашних животных.
Минусы роботов-пылесосов
Уход за роботом требует минимальных, но постоянных усилий. После каждой уборки контейнер нужно чистить. Турбощетка часто засоряется и тоже требует чистки.
С влажной уборкой с помощью робота-пылесоса много хлопот: требуется наполнить контейнер, сполоснуть тряпочку, вылить воду. Кому-то может показаться проще воспользоваться шваброй или тряпкой.
Роботы плохо справляются с засохшими пятнами, так что даже после влажной уборки пол не будет идеально чистым.
Такой девайс не подходит для уборки в помещениях с коврами на полу: он застревает и зажевывает их. Придется поднимать ковер, а после робота чистить его отдельно обычным пылесосом.
Робот-пылесос не может перемещаться по лестнице. Если жилище многоуровневое, придется переносить прибор с этажа на этаж, либо покупать несколько девайсов.
Помещение к уборке придется готовить: убирать с пола провода, игрушки, одежду.
По каким характеристикам выбрать робот-пылесос
Перед покупкой пылесоса нужно продумать:
- С какой целью приобретается девайс в первую очередь: поддерживающая сухая уборка или мытье полов?
- В квартиру или в дом (возможно, во втором случае потребуется несколько приборов)?
- Какую площадь придется убирать (от этого зависит тип аккумулятора)?
- Насколько захламлено помещение (от этого зависит выбор датчиков)?
Разбираемся с основными параметрами, которые стоит учитывать при выборе своего робота-пылесоса.
Тип аккумулятора
Аккумуляторы могут быть на основе никеля ( никель-металлгидридный) или лития (Li-Ion или Li-Po). Лучше выбирать литий, никелевый служит меньше, обычно через полгода-год его приходится менять.
Емкость аккумулятора
В идеале одного заряда должно хватать на одну уборку. нужно посчитать площадь помещения (за вычетом недоступных зон с мебелью, лестницы и так далее), которую предстоит обходить роботу, и уточнить в характеристиках, как расходуется заряд на 1 кв. м.
Мощность
Мощность всасывания отдельных роботов-пылесосов может доходить до 4 000 Па, для ежедневной сухой уборки достаточно 1000 Па. Но если в доме если домашние животные и проблема шерсти стоит остро, лучше выбирать более мощные модели.
Сегодня цена робота-пылесоса может начинаться от 2-3 тыс. руб., а может превышать 100 тыс. руб. Все зависит от комплектующих, функциональности и, конечно, бренда.
Тип уборки
Главный вопрос — нужна ли влажная уборка? Сейчас большинство моделей поддерживают эту функцию, но роботы плохо справляются с мытьем полов, зато эта процедура доставляет дополнительные хлопоты хозяину. Возможно, для поддерживающей уборки будет достаточно недорогой базовой модели.
Размер
Объем контейнера для пыли
Для уборки небольшой квартиры хватит контейнера для пыли объемом 250 мл. Однако чем просторнее помещение, тем больший должен быть объем (обычно до 500 мл). Большой контейнер реже забивается, значит, пылесос будет качественнее всасывать мусор.

Тип фильтра
У НЕРА-фильтров качество очистки воздуха выше, чем у электростатических, он работает дольше. Но, когда НЕРА-фильтр полностью засоряется, придется покупать новый. Электростатический фильтр можно просто помыть.
Стоит обратить внимание на умение пылесоса преодолевать высоту хотя бы 15 мм (или выше — в зависимости от порогов в доме). Даже самый умный робот будет периодически врезаться в мебель и углы, так что лучше, если по периметру его защитит резиновый бампер.
Размер и мощность базы
Док-станция должна быть небольшой (особенно критично для маленьких квартир), а от ее мощности зависит скорость зарядки. Если девайс будет готов к работе за 5-6 часов — это норма, хотя встречаются и более быстрые экземпляры.
Наличие турбощетки
Турбощетка — это спиралевидный валик с жесткой щетиной, благодаря которому робот чистит помещение примерно на 10% эффективней. Она хороша, если в квартире есть, к примеру, ковры с ворсом средней длины. Зато если в доме животные и много шерсти, турбощетка будет постоянно забиваться. В таком случае лучше присмотреться к моделям с модулем прямого всасывания (или девайсам, где эти насадки можно менять).
Функция самоочистки
Некоторые зарядные базы идут с дополнительным контейнером для мусора. По окончании уборки робот встает на подзарядку, а содержимое его пылесборника выгружается в контейнер базы. С такой функцией хозяевам не нужно каждый раз встряхивать мусоросборник самостоятельно, однако им все равно придется чистить боковые щетки и турбощетку. Наценка за самоочистку может достигать 20 тыс. руб.
Поддержка русского языка
Русификация робота предполагает переведенные инструкцию, приложение, озвучку и управление голосом. Но есть нюанс: однажды переведенное приложение не будет обновляться, как его оригинал на английском языке. Производители роботов-пылесосов уделяют много внимание интуитивно-понятному дизайну, поэтому не всегда стоит придавать значение этому параметру.
Уровень шума
Шум пылесоса напрямую зависит от его мощности всасывания. Чем громче он работает — тем больше соберет мусора. Ни один робот не убирается настолько тихо, чтобы в это время можно было вздремнуть. Поэтому уборку оптимально запускать, когда дома никого нет.
Форма
Квадратная или D-форма обычно подаются как преимущество, поскольку позволяют лучше собирать грязь в углах. На самом деле, грязь в углах полностью все равно не исчезнет, хотя ее и будет немного меньше.
Робот-пылесос или обычный: что лучше
Ни один робот-пылесос не заменит полноценной генеральной уборки. В любом случае понадобится иметь дома обычный пылесос и швабру.
Зато при грамотном выборе робот может освободить много времени и минимизировать число уборок до 2-4 в месяц. Эта техника — подспорье в хозяйстве, если с самого начала осознавать, на что она способна, а чего от нее не стоит ждать.
Читайте также: