
Для чего вентилятор в кабине вертолета
Обновлено: 03.05.2024
Настоящее изобретение относится к системе управления лопастями вертолета с помощью сжатого воздуха.
В частности, настоящее изобретение относится к системе управления лопастями вертолета с помощью сжатого воздуха, которая содержит компрессор для подачи сжатого воздуха к лопастям вертолета.
Несущий винт, из-за своей сложности, является фундаментальной системой вертолета. Лопасти летательного аппарата с несущим винтом представляют собой длинные и узкие аэродинамические лопатки с высоким коэффициентом соотношения сторон и с формой, которая сводит к минимуму сопротивление, вызванное завихрениями на конце лопаток.
Как правило, вертолет может иметь два несущих винта, главный и вспомогательный. Главный несущий винт имеет два типа вращения - вращение вокруг вертикальной оси, при котором лопасти вращаются с большой скоростью, создающей большую вертикальную подъемную силу, направленную противоположно весу вертолета, и наклонное вращение, при котором быстрое вращение лопастей создает подъемную силу, имеющую вертикальную составляющую, поддерживающую вес вертолета, и горизонтальную подъемную силу. В целом, несущий винт наклонен в направлении перемещения вертолета. Вспомогательный несущий винт находится в хвосте вертолета и предназначен для создания компенсационной подъемной силы, которая поддерживает хвост неподвижным, так как хвост, реагируя на вращение несущего винта, имеет тенденцию поворачиваться в противоположном направлении.
Кроме того, существуют вертолеты, в которых хвостовой несущий винт заменен турбовентилятором, расположенным в основании кабеля хвостовой балки, куда под давлением направляется от турбовентилятора воздух, который выпускается в поперечном направлении в конце хвостовой балки, создавая требуемую разворачивающую силу.
Вертолет также имеет двигатели, которые приводят в движение несущие винты, заставляя вращаться лопасти.
В известном уровне техники также имеются решения, в которых механическая мощность не передается непосредственно к лопастям, а предусмотрен газотурбинный двигатель, который генерирует сжатую текучую среду. В этих решениях приведение в движение лопастей достигается по существу выбросом горячего газа, сгенерированного в двигателе: текучая среда по существу берется из компрессора двигателя, в котором, однако, как следствие, изменяется термодинамический цикл двигателя с резким уменьшением полного коэффициента полезного действия. Затем текучая среда передается из двигателя к лопастям по неподвижным трубкам, установленным снаружи механической конструкции несущего винта вертолета, а затем она поступает в коробку, состоящую из двух частей, первая из которых прикреплена к конструкции вертолета, а вторая вращается с головкой несущего винта.
Тем не менее, проблема этих решений заключается в том, что коробка с горячей текучей средой под давлением в несколько атмосфер, около 5, на самом деле не является герметичной. Эти трубки, которые образуют трубопровод для текучей среды, на самом деле подвержены относительному вращению в области головки несущего винта. Кроме того, головка несущего винта подвержена воздействию вибраций от несущего винта и, поэтому, не является воздухонепроницаемой, имеет пониженные характеристики уплотнения с течением времени и, следовательно, предрасположена к утечкам с еще большим уменьшением полного коэффициента полезного действия.
Таким образом, уровень техники имеет проблемы, связанные с полным коэффициентом полезного действия и с потерей давления текучей среды. В частности, со ссылкой на первую проблему, летательный аппарат может успешно летать с расчетной нагрузкой, равной сумме веса топлива и веса подлежащих перевозке объектов, называемого полезной нагрузкой. Известные решения имеют очень низкий коэффициент полезного действия, не позволяющий перевозить значительные объемы топлива, в результате выполняя полет с определенной продолжительностью и небольшой нагрузкой или с полезной нагрузкой и с очень низкой продолжительностью. Вторая проблема состоит в конструкции конца реактивной системы: текучая среда, которая должна выходить на конце лопастей, но между неподвижной частью и вращающейся частью, находится под давлением, при этом потеря давления приводит к дополнительному уменьшению коэффициента полезного действия.
Решение этой проблемы было предложено в международной патентной заявке №96/25328, опубликованной 22 августа 1996 года, заявитель Milot Michel. В этой заявке раскрыта система управления лопастями вертолета с помощью сжатого воздуха, содержащая двигатель для генерации механической энергии, необходимой для создания подъемной силы вертолета; компрессор для генерации сжатого воздуха для управления полыми лопастями, соединительное средство для соединения двигателя с компрессором и соединительное средство для соединения компрессора с лопастями, содержащее полый вал несущего винта и вращающуюся полую головку несущего винта, поддерживающую лопасти. Полый вал несущего винта внутри имеет трубу, соединяющую этот вал с вращающейся полой головкой.
Несмотря на то, что во многих аспектах приведенное выше техническое решение имеет многочисленные преимущества, оно не решает проблемы выполнения соединения приводимых в действие реактивной тягой лопастей вращающегося несущего винта с источником энергии эффективным образом.
Целью настоящего изобретения является создание системы управления лопастями вертолета с помощью сжатого воздуха с тем, чтобы преодолеть ограничения, которые по-прежнему влияют на системы и вертолеты, описанные ранее со ссылкой на известные технические решения.
В соответствии с изобретением, предложена система управления лопастями вертолета с помощью сжатого воздуха, как определено в п. 1 формулы изобретения.
Для лучшего понимания изобретения далее описан предпочтительный вариант его выполнения, исключительно в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 представляет собой схематичный вид сбоку вертолета, содержащего систему управления лопастями вертолета с помощью сжатого воздуха, выполненную в соответствии с изобретением;
Фиг. 2A-2B представляют собой схематические виды первого и второго вариантов выполнения предложенной системы управления лопастями вертолета с помощью сжатого воздуха;
Фиг. 3 представляет собой первый схематический вид головки несущего винта вертолета, содержащего предложенную систему управления лопастями вертолета с помощью сжатого воздуха, причем головка содержит упругий и гибкий эластомерный канал, предназначенный также для нагнетания, и вращающуюся часть;
Фиг. 4 представляет собой первый схематический вид головки несущего винта вертолета, содержащего предложенную систему управления лопастями вертолета с помощью сжатого воздуха, причем головка содержит эластомерный канал, предназначенный также для нагнетания, и упругую часть;
Фиг. 5 представляет собой второй более подробный схематический вид несущего винта, показанного на Фиг. 3, и путь следования сжатого воздуха через головку к лопастям вертолета, имеющего две лопасти и содержащего предложенную систему управления лопастями вертолета;
Фиг. 6 представляет собой второй более подробный схематический вид, представленный на Фиг. 4, и путь следования сжатого воздуха через головку к лопастями вертолета, имеющего две или более двух лопастей и содержащего предложенную систему управления лопастями вертолета со сжатым воздухом;
Фиг. 7А представляет собой схематический вид сверху головки несущего винта двухлопастного вертолета, содержащего предложенную систему управления лопастями вертолета с помощью сжатого воздуха;
Фиг. 7В, 7С представляют собой схематические виды головки несущего винта, соответственно, трехлопастного вертолета и четырехлопастного вертолета, содержащего предложенную систему управления лопастями вертолета с помощью сжатого воздуха.
На чертежах и, в частности, на Фиг. 1 и 2 изображена система 20 управления лопастями вертолета с помощью сжатого воздуха, выполненная в соответствии с изобретением. Более подробно, вертолет 1 содержит несущий винт 3, лопасти 2 с соплами 4 для выпуска воздуха и систему 20 управления лопастями вертолета с помощью сжатого воздуха, содержащую первый механизм, выполненный с возможностью генерации механической энергии, второй механизм, выполненный с возможностью генерации массы текучей среды в виде газа, например сжатого воздуха при низкой температуре (около 50°C) и давлении приблизительно 2,5 атмосфер, для управления лопастями 2, и соединительные элементы первого механизма со вторым механизмом и второго механизма с лопастями 2.
Точнее, первый механизм содержит двигатель 5, а второй механизм содержит компрессор 8. Предпочтительно, в соответствии с изобретением, двигатель 5 может быть любым двигателем, который генерирует механическую энергию.
Преимущественно, в соответствии с изобретением, сжатый воздух генерируется компрессором 8, который использует механическую мощность двигателя 5.
Соединительные элементы первого механизма со вторым механизмом могут содержать высвобождаемый элемент 6, например механический, расположенный выше по потоку от компрессора, как показано на Фиг. 2B, или пневматический, расположенный ниже по потоку от компрессора, как показано на Фиг. 2A, для свободного вращения несущего винта 3, который воздействует на двигатель 5, и редуктор 7 на высвобождаемом элементе 6, выполненный с возможностью приведения в действие компрессора 8. Соединительные элементы второго механизма с лопастями 2 содержат полый вал или мачту несущего винта 3, содержащую внутри трубу 9, и упругую вращающуюся полую головку 13 несущего винта 3.
В соответствии с одним аспектом изобретения, высвобождаемый элемент 6 представляет собой сцепление или аналогичный элемент.
Фиг. 3 подробно изображает упругую вращающуюся полую головку 13 несущего винта, через которую сжатый воздух может передаваться из полого вала несущего винта 3 к полым лопастям 2. В частности, между трубой 9 полого вала несущего винта 3 и полыми лопастями 2 расположен гибкий и деформируемый эластомерный канал 15.
Преимущественно, в соответствии с изобретением, как показано на Фиг. 3 и 5, упругая / вращающаяся полая головка 13 несущего винта поддерживается конструкцией 17, закрепленной на полом валу несущего винта 3, которая, посредством шарнира 14, называемым втулкой несущего винта, поддерживает вращающиеся лопасти 2, но только в вертолете с двумя лопастями и втулкой несущего винта. Конструкция 17 соединяет, в двухлопастном решении с шарниром, показанном на Фиг. 3, мачту 9 с лопастями 2 через вращающуюся часть 18 головки 13 несущего винта, вращающейся вокруг шарнира 14.
В соответствии с одним аспектом изобретения, конструкция 17 является металлической.
В соответствии с другим аспектом изобретения, конструкция 17 изготовлена из конструкционных материалов, например металлов, или композиционных материалов, или других.
Преимущественно в соответствии с изобретением, конструкция 17 выполнена с возможностью поглощения сил, действующих на упругую / вращающуюся полую головку 13, показанную на Фиг. 3 и 5, и упругую / гибкую полую головку 13, показанную на Фиг. 4 и 6.
На Фиг. 7A изображен, для двухлопастного вертолета, вид сверху головки 13 несущего винта, закрепленной на полом валу несущего винта 3 и поддерживающей вращающиеся лопасти 2. Вращающаяся часть 18 головки несущего винта содержит втулку 14 несущего винта и ответвления 19a и 19b, проходящие из ответвлений \/-образной эластомерной гибкой трубки канала 15, к которой присоединены лопасти 2 вертолета.
В соответствии с другим аспектом настоящего изобретения, как показано на Фиг. 4, в вертолете, имеющем N лопастей, горизонтальная гибкая конструкция 17a имеет ту же функцию, что и вращающаяся часть 18, изображенная на Фиг. 5, т.е. обеспечивает возможность махового движения. Таким образом, горизонтальная гибкая конструкция 17a имеет разветвленную структуру, имеющую N ответвлений, проходящих, как показано номерами позиций 19a, 19b, 19c, для трехлопастного вертолета, изображенного на Фиг. 7B, и проходящих, как показано номерами позиций 19a-19b-19c-19d, для четырехлопастного вертолета, изображенного на Фиг. 7C.
Преимущественно в соответствии с изобретением, эта конкретная конфигурация упругой полой головки 13 и гибкого канала 15 позволяет отслеживать относительные перемещения между валом несущего винта 3 и лопастями 2 и создавать путь для прохода сжатого воздуха в направлении сопла 4 лопастей 2. Соединение трубы 9 полого вала несущего винта 3 с каналом 15 и с лопастями 2 обеспечивает герметичное соединение между этими элементами.
Преимущественно в соответствии с изобретением, система 20 может быть реализована в вертолетах с двухлопастными несущими винтами или несущими винтами, имеющими более двух лопастей. В этом случае канал 15 выполнен внутри полого эластомерного корпуса из армированного материала со специальным переплетением проволок из прочных материалов (как, например, стекло, или углерод, или кевлар, или бор) и их комбинации для получения требуемых характеристик упругости, образуя несколько упругих труб, по одной для каждой лопасти, которые направляют сжатый воздух на концах каждой лопасти.
При работе двигатель 5 действует на высвобождаемый элемент 6, который, посредством редуктора 7, приводит в действие компрессор 8. Последний подает сжатый воздух внутрь трубы 9 вращающегося вала винта 3.
Предпочтительно в соответствии с изобретением, генерируемый сжатый воздух проходит через гибкий эластомерный канал 15 и упругую полую головку 13 и распределяется внутри лопастей 2, приходя к соплам 4 за счет упругой деформации эластомерного канала 15 и, соответственно, вращающейся части 18 в двухлопастном вертолете и гибкой конструкции 17a в вертолете, имеющем более двух лопастей.
В соответствии с другим аспектом настоящего изобретения, вертолет 1 не имеет вспомогательного несущего винта.
Таким образом, предложенная система управления лопастями вертолета с помощью сжатого воздуха позволяет обойтись без внешних неподвижных трубок, используемых для передачи текучей массы газа к лопастям летательного аппарата, благодаря особой форме полой вращающейся головки несущего винта и эластомерного гибкого канала.
Еще одно преимущество предложенной системы управления лопастями вертолета с помощью сжатого воздуха состоит в увеличении полезной нагрузки за счет уменьшения общего веса воздушного судна, обходясь без всех приводных механизмов и самого вспомогательного несущего винта.
Кроме того, предложенная система управления лопастями вертолета с помощью сжатого воздуха позволяет получить более высокий уровень безопасности благодаря устранению вероятности поломки механической системы передачи движения к вспомогательному несущему винту.
И, наконец, предложенная система управления лопастями вертолета с помощью сжатого воздуха позволяет получить предельную нагрузку, равную предельной нагрузке классической системы механического привода главного несущего винта и вспомогательного несущего винта.
Наконец, ясно, что система управления лопастями вертолета с помощью сжатого воздуха, описанная и проиллюстрированная в настоящем документе, может быть модифицирована и видоизменена без отхода от объема защиты настоящего изобретения, как определено в прилагаемой формуле изобретения.

Мы с Вами уже выяснили как, в принципе, управляется вертолет, и как работает автомат перекоса. А сегодня внесем некоторую ясность в вопрос о том, какую роль во всем этом играет пилот. Какие даны ему органы управления для решения вобщем-то непростой задачи, каковой является управление вертолетом
С самолетом все более-менее понятно. У него есть две самостоятельные системы: система управления самолетом (собственно управление рулями и элеронами) и система управления двигателем. И органы в кабине экипажа в количестве трех штук 🙂 : ручка управления самолетом (РУС), ручка управления двигателем (РУД), и педали для управления рулем направления. Как в этом плане обстоят дела у вертолета?…
Начнем с того, что определим более конкретно типы управления вертолетом.
Первое — это вертикальное управление . Осуществляется путем одновременного изменения угла установки лопастей несущего винта (то есть изменением общего шага). Делает это автомат перекоса.
Второе — путевое управление .То есть изменение направления полета. Осуществляется при помощи рулевого (хвостового) винта путем изменения его тяги (то есть изменение общего шага рулевого винта). Если вертолет двухвинтовой схемы (без хвостового винта), то путем изменения крутящего момента одного из винтов. Об этом я уже говорил ранее.
Третий тип — поперечное управление . Это управление вертолетом по крену . Крен создается наклоном плоскости вращения винта (а значит и полной аэродинамической силы винта) в нужную сторону, вправо или влево. При этом появляется боковая составляющая полной аэродинамической силы, обеспечивающая возможность бокового движения вертолета. Кроме того сила тяги винта теперь уже не проходит через центр тяжести вертолета. Поэтому относительно него появляется момент, кренящий вертолет в нужную сторону. Все это тоже прерогатива автомата перекоса.
Ну и четвертый тип управления вертолетом — продольное управление . Это управление вертолетом по тангажу , при этом вертолет летит вперед или назад с соответствующей скоростью. Осуществляется путем наклона плоскости вращения несущего винта и, соответственно, вектора полной аэродинамической силы в продольном направлении, вперед или назад. При этом создается угол тангажа (вертолет опускает или поднимает нос) из-за создания момента наклоненной аэродинамической силы относительно центра тяжести вертолета. Плюс появляется горизонтальная составляющая этой силы, которая, собственно, и движет вертолет в нужном направлении. Главную роль здесь опять же играет автомат перекоса, меняющий циклический шаг винта.
Теперь о том, что у нас в кабине. У пилота есть собственно две ручки управления вертолетом.
Первая – ручка управления циклическим шагом винта (или просто ручка управления вертолетом). Она самолетного типа, расположена перед креслом пилота, и с ее помощью осуществляется продольное и поперечное управление вертолетом. От нее через специальную систему тяг и качалок воздействие передается на тарелку автомата перекоса, которая, в свою очередь, определяет циклический угол установки лопастей.
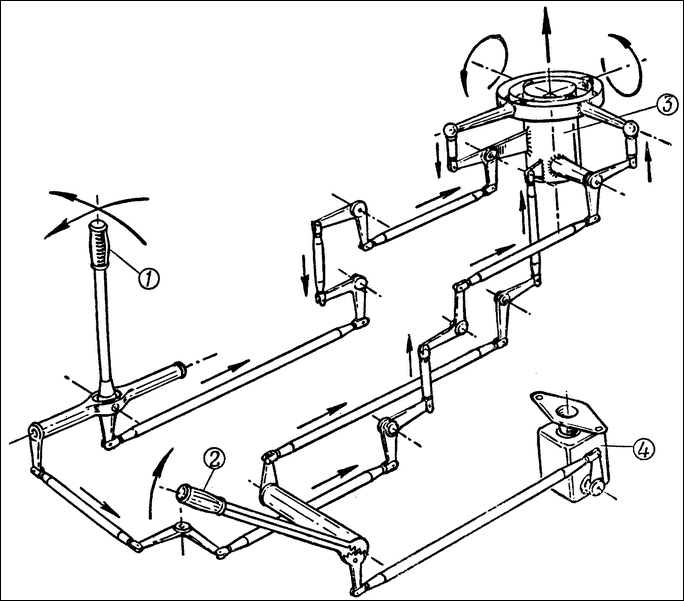
Системы управления циклическим и общим шагом винта.

Кабина вертолета. Хорошо видны спаренные ручки управления и ручки шаг-газ.
Отдельно от шага винта мощность двигателя может меняться только в небольших пределах для необходимой корректировки. Для этого на ручке шаг-газ существует специальный корректор ( обычно что-то типа поворотного кольца).
На схеме под номерами: 1 — ручка управления циклическим шагом; 2 — ручка шаг-газ; 3 — автомат перекоса; 4 — агрегат системы управления двигателем.
Кроме ручек управления есть еще педали . С их помощью опять же через систему управления вертолетом летчик воздействует на рулевой винт с целью изменения общего шага его лопастей, меняя тем самым, его тягу и, соответственно, разворачивающий момент вертолета.
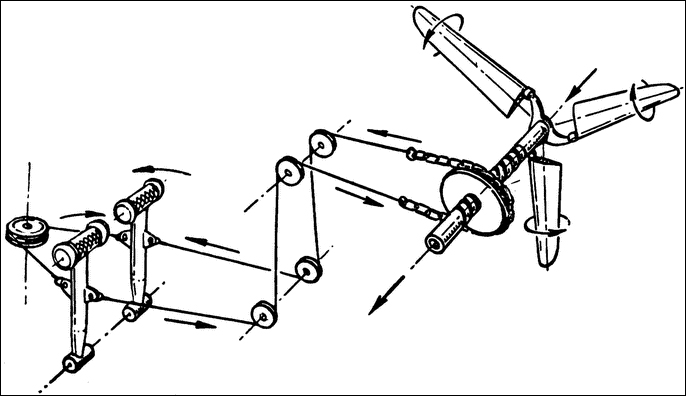
Система управления шагом рулевого винта.

Кабина вертолета. Хорошо видны ручка управления и правая педаль.
При использовании всех описанных органов управления вертолетом, этот аппарат превращается в маневренную машину с довольно широкими возможностями.
Основные режимы полета вертолета – это взлет, висение, разгон и набор высоты, маневрирование и далее снижение и посадка . Обычные, впрочем, режимы для любого летательного аппарата, за исключением, конечно, висения. Этот режим доступен еще только самолетам с вертикальным взлетом и посадкой (СВВП), не считая, конечно, всякой экзотики :-).
Способ взлета выбирается в зависимости от состояния самого аппарата и от внешних условий. Определяющим в этом плане является запас мощности двигателя, что вполне понятно :-). Этот запас, в свою очередь, зависит от массы вертолета (точнее взлетной массы) и от таких параметров состояния атмосферы, влияющих на параметры работы двигателя и несущего винта, как местное давление воздуха, температура и влажность (влияющие на плотность воздуха).
Взлет по вертолетному.
Кроме того на выбор способа взлета влияет размер и состояние поверхности площадки, на которой находится вертолет, наличие каких-либо препятствий по курсу взлета и обязательно направление и сила ветра у земли.
Чем выше барометрическая высота места взлета (ниже давление), чем выше температура и влажность воздуха, а также чем ниже скорость встречного ветра, тем ниже запас мощности двигателя, и тем ниже должна быть взлетная масса вертолета.
Взлет по вертолетному – это основной вид взлета для современных аппаратов. Он, однако, тоже может иметь различную конфигурацию. Дело в том, что при работе воздушного винта вблизи земли может появиться эффект воздушной подушки . Это явление, я думаю, известно практически каждому современному человеку.
Воздух, отбрасываемый несущим винтом вниз тормозится у земли и образует как бы поддерживающую аппарат подушку. Такое может происходить обычно на совсем малом расстоянии от земной поверхности. Считается, что для вертолета это явление можно принимать во внимание, если расстояние от земли до плоскости вращения винта равно радиусу винта (или меньше). В этом случае прирост подъемной силы составляет 10-15%.
Так вот взлет по вертолетному может осуществляться с разгоном вне зоны воздушной подушки или в ее зоне , а также может осуществляться разгон по наклонной траектории.
Первый случай выбирается тогда, когда взлетная площадка имеет ограниченные размеры и окружена высокими препятствиями, а также если она имеет сильное запыление или покрыта свежевыпавшим снегом. Режим работы двигателя при таком взлете – максимальный то есть запаса по мощности нет.
Это самый напряженный режим взлета, а при отказе двигателя (одного из двигателей) безопасная посадка не гарантирована. Вертикальный подъем должен осуществляться до высоты обеспечения прохода над препятствиями с превышением не менее 5 метров.
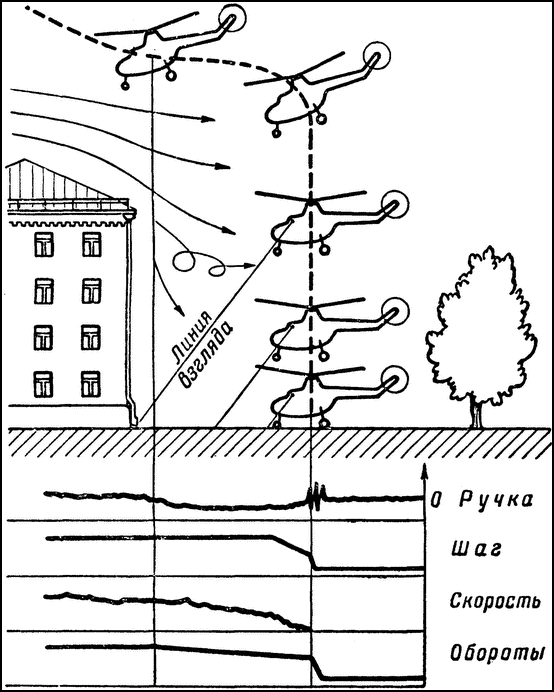
Взлет вне зоны воздушной подушки с площадки, ограниченной препятствиями.
Разгон по наклонной траектории может быть использован на такой же площадке, но с высотой препятствий до 5 метров. Запас мощности при таком взлете должен обеспечивать одновременный разгон с набором высоты. Должна быть гарантирована безопасная посадка в случае отказа двигателя (одного из двигателей).
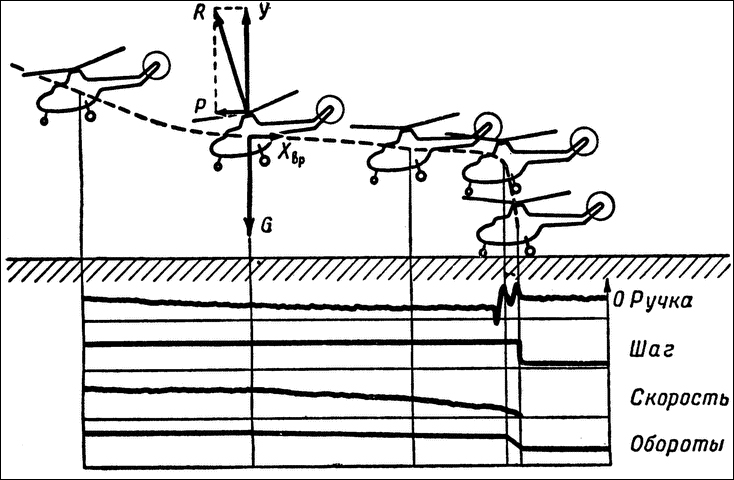
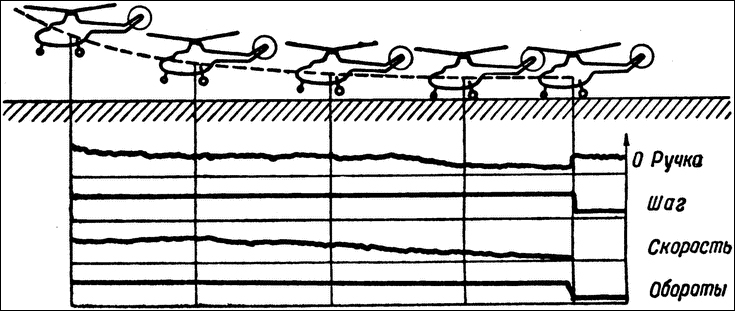
Взлет с разгоном в зоне воздушной подушки – самый распространенный способ взлета. Он обычно производится с аэродромов (вертодромов), имеющих открытые подходы. При этом двигатель работает обычно на номинальном режиме, то есть имеется запас мощности для необходимого, в случае чего :-), маневрирования. Вертолет после контрольного висения разгоняется вдоль земли с углом тангажа на пикирование в 10-15 º (иной раз и больше, и это очень эффектно :-)) и далее переходит в набор высоты. Этот взлет, кстати, – самое распространенное из того, что мы видим в кино.
Если по вертолетному взлететь невозможно, то вертолет может взлететь по самолетному , вырулив для этого к месту старта. Далее все как у самолета :-). Ручка шаг-газ устанавливается на взлетный режим, ручка управления дается немного от себя (для появления горизонтальной тяги), вертолет разбегается и, набрав определенную скорость (порядка 40-50 км/ч), после небольшого взятия ручки управления на себя, отрывается от земли. Далее некоторое выдерживание на высоте около 1,5 метров и подъем.
Взлет по самолетному.
Вот так вкратце о возможностях взлета. О других рабочих (а также аварийных и специальных) режимах полета поговорим в следующих статьях и по пожеланиям трудящихся :-).
А пока всем, я думаю, понятно, что на любых режимах полета управление производится совместными перемещениями ручек управления вертолетом, шаг-газ и педалями. Управление вертолетом максимально приближено к самолетному, но отличия, конечно, на лицо. Пилотов вертолетов даже наблюдению из кабины за землей учат по-другому. Ничего не поделаешь, специфика. Да и сравнивать вертолет и самолет наверное было бы неправильно. Однако, как говорится глаз радует и тот и другой :-). Оба летают удивительно красиво. Что еще нужно ? 🙂 :-)…….
В конце статьи помещаю ролик, который уже есть в моей статье о турбовальном двигателе. Для сегодняшней статьи он подходит как нельзя лучше :-). Взлет с разгоном в зоне воздушной подушки. Правда не совсем типичный, а с применением еще одного элемента под названием шик, граничащий с воздушным хулиганством. Однако ведь до чего ж эффектно выглядит! :-). Летчик… Снимаю шляпу…
Разговор двух блондинок:
- Как ты думаешь, зачем на вертолете такой большой пропеллер?
- Это вентилятор, он нужен для того, чтобы пилот не потел!
- Чушь!
- Нет, не чушь! Я совсем недавно летела на вертолете. Так вот, перед самым приземлением этот вентилятор вдруг перестал крутиться. Ты бы видела, как пилот сразу вспотел! разговор чушь блондинка приземление вертолет вентилятор пропеллер пилот
две блондинки ползут по миннему полю натыкаются на надпись мин нет одна другой сколько этим занимаюсь впервые вижу что миннет пишется с двумя н
по ходу про и для блондинок))) та что видела как потеет пилот, уже б ничего не рассказала)))
отлично, Машуля а ты не родственница Юрию Никулину?
а он так любил анекдоты.
А кто же их не любит?
ну, допустим у всех реакция . своя
Не буду спорить.
Ну, всего тебе доброго, Машулечка!
И вам всего хорошего!
Лучше про блондинок пишите.
и не только вспотеешь!
краткость -сестра таланта
ахахах. блондинки могут
А БЛОНДИНКА ПЕРЕСКАЗАЛА..
К чему этот анекдот?
это анекдот о глупеньких блондинках))))
То, что о глупеньких блондинках понятно, но суть вопроса-то в чем?
Ткни меня в это носом!)
зачем?ты врозлая девочка и должна сама понимать такие вещи.
Мне правда, стыдно, обидела девочку, ребенка, наверное..
ого тут такая дискусия по поводу меня) юлия начнём стого, что я не обиделась просто раз ты пишишь что тебе не интирестны как ты выразилась безграмотные люди , зачем тогда дальше обсуждать, это во первых во вторых, если человек зделала 2 ошибки в слове это не значит что он овощь как ты выразилась выше, я считаю что в твоём случае это просто маральная безграмотность так называть человека которого ты совсем не знаешь и вглаза не видела, не надо делить всех людей на чёрное и белое., ты тогда у себя в онкете напиши общаюсь и переписоваюсь только с людьми с красными дипломами и высшем образованием, потверждёные тестом ИГЭ по русскому языку) а что касаемое нашла ли я свой фрукт то да нашла и довольно счастлива с ним 7 лет имея 2 детей, и могу сказать что он довольно образованый и умный человек, не стоит смотреть на людей только с точки правописания слов, а то в таких случаях рискуешь остаться со словарём в обнимку одна, с людьми общаються и любят не только из за краоты а исхлдя от моральных качеств человека.

После создания самого большого в мире вертолета Ми-6 главный конструктор и ведущие специалисты ОКБ М. Л. Миля отнюдь не считали исчерпанными возможности дальнейшего увеличения размеров и грузоподъемности винтокрылых машин. Народное хозяйство и особенно вооруженные силы часто нуждались в перевозке неразъемных грузов массой свыше 20 т с помощью летательных аппаратов вертикального взлета и посадки. Первые исследования по созданию сверхтяжелого вертолета, получившего обозначение В-12 (Ми-12), или изделие 65, начались в ОКБ в 1959 г. Спустя два года председатель Госкомитета по авиационной технике П. В. Дементьев официально утвердил заводу задание на проработку вертолета грузоподъемностью 20 – 25 т.
Одновременно на фирме рассматривали возможность создания и большей машины, способной поднимать грузы до 40 т и получившей название В-16 (Ми-16). В те же годы проектирование подобных вертолетов велось и на крупнейших американских фирмах, но там дальше этапа эскизного проекта дело не пошло. Проработки же милевцев убедили правительство в реальности постройки сверхтяжелого вертолета, и 3 мая 1962 г. последовало постановление Совета Министров СССР о разработке В-12 с грузовой кабиной, аналогичной грузовой кабине гигантского самолета Ан-22, проектируемого ОКБ О. К. Антонова. Вертолет должен был перевозить различные виды боевой техники массой до 25 т, в том числе новейшие баллистические ракеты стратегического назначения 8К67, 8К75 и 8К82.

Модель вертолета В-12, выполненного по одновинтовой схеме с четырьмя двигателями
Заместитель главного конструктора по В-12 был назначен Н. Т. Русанович, в 1968 г. его сменил М. Н. Тищенко; ведущим конструктором стал Г. В. Ремезов. Ведущими инженерами по летным испытаниям были Д. Т. Мацицкий и В. А. Изаксон-Елизаров. Большинство отечественных и зарубежных авторитетных специалистов считали, что наиболее рационально для вертолета большой грузоподъемности использовать продольную схему. Для изучения особенностей этой схемы Летная станция завода № 329 получила армейский Як-24 и приобретенный в США вертолет Боинг-Вертол V-44. На них исследовались проблемы взаимовлияния винтов и распределения между ними мощности, определения потребной мощности двигателей на режимах полета, оценивались возможности полета со скольжением и т.п. Параллельно конструкторы ОКБ М. Л. Миля создавали первый проект В-12, в котором расположены продольно винтомоторные группы Ми-6 были соединены синхронизирующим валом с перекрытием несущих винтов. Из-за опасности схлестывания пятилопастных несущих винтов их расположили с минимальным перекрытием.
В связи с этим фюзеляж получился довольно громоздкий и более длинный, чем требовалось по ТТТ. Принципиальный недостаток компоновки заключался в том, что воздухозаборники задней пары двигателей находились в зоне выхлопов передней винтомоторной группы – возникала опасность помпажа двигателей. Анализ особенностей продольной схемы показал, что она приводит к низким значениям динамического потолка, скорости и скороподъемности, невозможности продолжать полет при отказе двух двигателей и резкому ухудшению летных характеристик на динамическом потолке и при повышении температуры наружного воздуха, а также к ряду других нежелательных последствий. Поэтому от продольной схемы пришлось отказаться.

Натурный испытательный стенд окончательного варианты вертолета В-12

Макет В-12 в сборочном цехе МВЗ в Панках
Разработка сверхтяжелого двухвинтового вертолета поставила перед милевцами ряд сложных проблем, специфических для поперечной схемы, которые к тому же усугублялись большими размерами проектируемого аппарата. Как известно, именно эти проблемы стали причиной неудач многих талантливых конструкторских коллективов в разных странах, пытавшихся строить винтокрылые машины поперечной схемы. Ряд крупнейших специалистов авиационной промышленности, в том числе видных ученых ЦАГИ, считали, что такая схема бесперспективна. Тем не менее, М. Л. Миль и его единомышленники взялись за решение этой задачи и уверенно отстаивали свою правоту перед компетентными правительственными комиссиями.

Выкатка вертолета В-12 из сборочного цеха МВЗ в Панках на доводочную площадку, 1967 г.

Проект вертолета В-16 поперечной двухвинтовой схемы с двумя ГТД
Для проверки расчетов жесткостных и частотных характеристик конструкции планера проводились исследования на динамически подобных моделях В-12, изготовленных в масштабе 1:10. Началось строительство натурного испытательного стенда для доводки несущей системы, трансмиссии и силовой установки. Проводились продувки моделей вертолета в аэродинамических трубах ЦАГИ. К разработкам привлекались многие смежники. В апреле 1965 г. последовало постановление Совета Министров о строительстве первого опытного вертолета. На фирме М. Л. Миля значительно усилили производственную и экспериментальную базы, пополнили штат новыми сотрудниками, а на саратовском авиационном заводе была начата подготовка к выпуску первой войсковой серии из пяти вертолетов В-12. В конце того же года на натурном макете В-12 военный заказчик исследовал возможность размещения 36 видов тяжелой боевой техники. В апреле 1966 г. государственная комиссия окончательно одобрила натурный макет, и началась сборка первого опытного образца.

Модель вертолета В-12, выполненного по одновинтовой схеме с двумя мощными ГТД
После завершения сборки первый летный экземпляр проходил частотные испытания прямо в сборочном цехе. Его подвесили на амортизационных шнурах к специальным порталам, на втулках несущих винтов установили имитаторы лопастей и вибраторы. Подобные фундаментальные исследования проводились впервые в практике мирового вертолетостроения. Они подтвердили результаты расчетов жесткости и вибраций, и в начале лета 1967 г. первый летный образец был признан готовым к летным испытаниям.
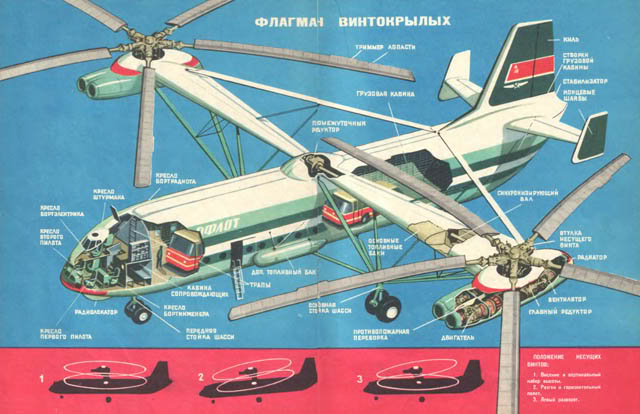
Воздушный гигант В-12 представлял собой четырехдвигательный транспортно-десантный вертолет двухвинтовой поперечной схемы. Винтомоторные группы от Ми-6 крепились на концах ферменных консолей. Диаметр готовых несущих винтов оказался недостаточным для этого вертолета, что потребовало форсирования исходный силовых установок. В ОКБ П. А. Соловьева для В-12 создали специальную модификацию серийного двигателя Д-25Ф мощностью 6500 л.с. Крылья с сужением меньше единицы имели небольшой угол поперечного V для улучшения пилотажных характеристик вертолета. В центроплане был установлен промежуточный редуктор, обеспечивавший излом трансмиссионного вала. Трансмиссионный вал синхронизировал вращение имевших трехметровое перекрытие несущих винтов и передавал мощность с одного редуктора на другой при управлении по крену и в случае отказа одного или даже двух двигателей с одной стороны. Горючее размещалось в крыльевых и наружных подвесных топливных баках.

Модели первоначальных вариантов вертолета В-12
Фюзеляж В-12 был выполнен в виде полумонокока и походил внутри, по образному выражению одного из иностранных специалистов, на гигантский готический собор. Его переднюю часть занимала двухэтажная кабина экипажа. На нижнем этаже располагались два летчика, бортинженер и бортэлектрик, на верхнем – штурман и бортрадист. В хвостовой части фюзеляжа находились силовой трап и боковые створки, которые при раскрытии образовывали проем для въезда самоходной техники и погрузки различных грузов с помощью мощных электролебедок и тельферов. Центральную часть фюзеляжа занимал большой грузовой отсек размером 28,15 х 4,4 х 4,4 м. В нем могли разместиться 196 солдат или 158 раненых.

Изготовление первого экземпляра вертолета В-12 в сборочном цехе завода № 329 в Панках

Ферменная консоль с крылом
Система управления В-12 проектировалась с учетом большой протяженности проводки, возможный деформаций конструкции, большой массы и достаточно больших сил трения элементов проводки. Система была двухкаскадной и включала в себя основные и промежуточные гидроусилители, автоматические устройства, обеспечивающие допустимые нагрузки на органы управления и эффективную синхронизацию их отклонения. Питание промежуточных гидроусилителей рулей поворота и высоты осуществлялось от гидросистемы, находящейся в отсеке промежуточного редуктора, а основных гидроусилителей – от гидросистем, расположенных в левой и правой мотогондолах. Все три системы были совершенно автономны, каждая из трех систем, в свою очередь, состояла из основной и дублирующей систем.

Погрузка пожарного автомобиля в кабину вертолета В-12
Шасси вертолета В-12 было трехопорное. Передняя опора с самоориентирующимися сдвоенными колесами находилась под кабиной экипажа, основные опоры со сдвоенными колесами – под левой и правой фермами. Все стойки шасси имели пневмомаслянные амортизаторы. Сзади фюзеляжа располагалась дополнительные хвостовые опоры, позволяющие загружать тяжелую технику в грузовую кабину.
Новый вертолет был оборудован современными пилотажно-навигационными системами, позволяющими выполнять полеты в сложных метеоусловиях. Существенно упростить пилотирование В-12 должны были четырехканальный автопилот и система автоматического поддержания заданной частоты вращения несущего винта.

Сверхтяжелый вертолет В-12 рядом с легким вертолетом Ми-2
После этих усовершенствований, повысивших также эффективность управления, с декабря 1967 г. начались систематические подъемы В-12 он совершил перелет с заводской площадки на летно-испытательную станцию МВЗ. Вся программа заводских испытаний была выполнена за месяц без осложнений, чему в значительной мере способствовали очень хорошая теоретическая подготовка и экспериментальная отработка всего проекта. Динамическая система не нуждалась в доводке, так как при создании В-12 использовались отработанные в эксплуатации агрегаты силовой установки и несущей системы от вертолета Ми-6.




Несмотря на свои уникальные характеристики, В-12 так и не поступил в серийное производство и эксплуатацию. Причин тому было несколько. Главная заключалась в том, что задача, для выполнения которой создавался В-12, — обеспечение мобильного базирования баллистических ракет стратегического назначения — к концу 60-х годов потеряла актуальность. Заказчик изменил концепцию базирования ракет. Некоторые типы ракетных комплексов, под которые разрабатывался В-12, оказались неудачными и были сняты с вооружения (по этой же причине планировавшаяся к производству большая серия Ан-22 была резко сокращена). Другие аналогичные виды военных грузов не нуждались столь остро в таком дорогостоящем средстве доставки, как вертолет. Кроме того, саратовский завод, готовившийся к производству В-12, к моменту принятия решения о запуске гиганта в серию оказался плотно загруженным изготовлением другого вида продукции. И в довершение всего, в сложившихся обстоятельствах ОКБ оказалось не заинтересованным во внедрении В-12, так как это могло бы помешать начавшейся разработке нового перспективного тяжелого вертолета третьего поколения Ми-26, несколько уступающего двухвинтовому гиганту по грузоподъемности, но зато значительно превосходящего его по технико-экономическим показателям.

Подготовлено на основе:
В.Р.Михеев. Московский вертолетный завод им.М.Л.Миля. 50 лет. М., Любимая книга. 1998.
Читайте также: