
Как собрать дрон своими руками с камерой
Обновлено: 10.05.2024
Китайская компания DJI - давно и успешно осваивает международный рынок беспилотных летательных аппаратов. Квадрокоптер и другие дроны этой компании пользуются большой популярностью во всем мире. Линейка квадрокоптеров представлена достаточно широко от любительских до профессиональных аппаратов. Несмотря на то что цены на квадрокоптеры DJI колеблются довольно широко и любой может приобрести хотя бы любительскую модель, есть много желающих создать квадрокоптер своими руками.
Готовый комплект
Для всех кто хочет создать квадрокоптер своими руками, но не хочет разбираться в нюансах и тонкостях документации, инструкций и калькуляторов предусмотрена возможность покупки готового комплекта. Необходимо только собрать готовые части и настроить, несомненно это будет полезным опытом и первым шагом для всех кто впоследствии хочет сделать квадрокоптер комбинируя различные части и создавая свой уникальный аппарат.
Своими руками
Строить коптер с нуля — выбор продвинутых пользователей БПЛА. Это довольно сложно, но вместе с тем очень интересно. Для начала определитесь как именно будет использоваться квадрокоптер. Учитывая это, нужно подобрать оптимальные компоненты квадрокоптера, выбрать раму и остальные части аппарата.
Из чего сделать квадрокоптер?
Если вы решили создавать квадрокоптер из зап частей своими руками, необходимо приобрести все основные детали, исходя из вашего бюджета и цели для которой вы создаете квадрокоптер.
Детали для сборки квадрокоптера:
- рама;
- моторы;
- пропеллеры;
- пульт;
- регуляторы оборотов;
- батарея;
- камера;
- контроллер.
Компания DJI выпускает все эти детали в широком ассортименте, поэтому при создании коптера вполне реально подобрать компоненты с необходимыми характеристиками.
При создании коптера особое внимание стоит уделить — контроллеру. Это устройство является мозгом любого БПЛА.
Универсальный
Ярким примером такого вида контроллеров является DJI NAZA. Его можно устанавливать в комплекте с любой сборкой. Такой контроллер не заточен под управлением конкретного аппарата. Плюсом универсальных контроллеров является наличие различных функций и датчиков, к тому же есть возможность повесить на него дополнительное оборудование. Основным минусом таких контроллеров является их высокая стоимость и необходимость настройки с использованием специальной программы.
Специализированный
Этот тип контроллера предназначен для работы с определенной компоновкой квадрокоптера. Конечно некоторый простор для маневра остается, но он довольно сильно ограничен. Для начинающего юзера именно то что нужно. Стоит недорого, умеет мало.
Есть множество различных инструкций как построить квадрокоптер, но необходимо помнить что собирать его нужно из качественных и надежных деталей, только тогда квадрокоптер будет работать долго и выполнять все необходимые функции.

Но, выход есть – квадрокоптер своими руками. Пошаговая сборка кажется сложной только на первый взгляд.
Весь этап изготовления своими руками состоит из:
- сборки рамы;
- закупки необходимых запчастей;
- сборки;
- проведению проводки.
- Изготовление рамы
Ее можно сделать своими руками из фанеры размером 150х150 мм или алюминиевого профиля размером 14х14 мм. Винтами прикручивают по диагонали лучи, длина которых равна 300 мм. Отверстия для моторов можно просверлить уже после того, как квадрокоптер будет собран.

Необходимые запчасти
- аккумулятор для дрона – 8 шт.;
- батарея для аппаратуры;
- зарядка – 1;
- пропеллеры на 10 дюймов;
- плата управления (HK multi-rotor control board 2.1);
- аппаратура Turnigy 9x.
Все вместе обойдет вам примерно в 120 долларов. Но, ждать посылку из Гонконга придется около 20 дней. Плюс к этому 5 дней, пока можно получить импорт. К указанной сумме добавить нужно 3-15 баксов за доставку.
Сборка
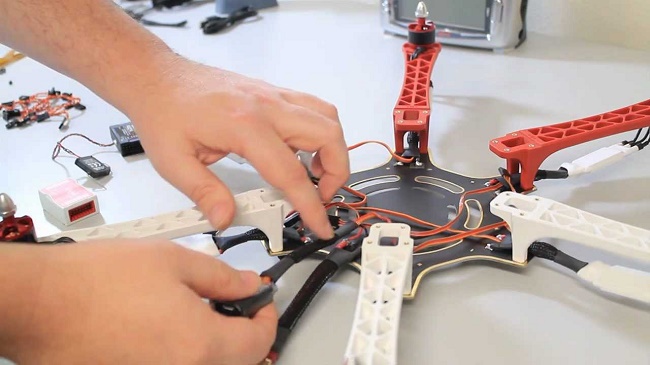
Нужно максимально точно по центру платформы разместить плату управления. Отверстия для нее просверливают через лучи и фанеру. Плата к лучам крепится с помощью саморезов по металлу.
С платой рядом приклеивают приемник, применив сумермегаклей. Им же можно клеить к лучам антенну. Если назначение каналов у него и платы совпадают, их допускается трехжильными шлейфами.

Для вала мотора, нужно просверлить отверстие. Рекомендуется его делать сквозным и на всю ширину квадрата, чтобы за края подставки не цепляться:

Прикручиваем выводами моторы к платформе, пользуясь винтами М3 длиной не больше 4 мм, поскольку такой размер имеет профиль. Делают это, чтобы не испортить обмотку, не способствовать межвитковому замыканию в случае повреждения лака на проводе.
Проводка

Схема подключения приводится ниже:
В результате получится такой квадрокоптер, сделанный своими руками, весом один килограмм. Можно проводить тестовый полет.

Это был простой квадрокоптер своими руками. Если же нужно квадрокоптер собрать самому, да еще с камерой, отличался бы который неплохой производительностью и хорошими летными качествами, есть другой вариант. Сборка зависит от конкретной модели, особенностей электроники и числом элементов конструкции.

Детали для дрона своими руками с камерой
К ним относятся:
- двигатель D2822/14 – 4 шт.;
- регулятор оборота – столько же;
- роторы вращения – левые и правые;
- силовой разветвитель, или разъем на 3,5 мм для подключения регуляторов оборотов.
Не обойтись без платы для регулировки квадрокоптера своими руками, подключаемой к компьютеру через USB — MultiWii ATmega32U4. Чтобы запуск состоялся нужны аккумуляторы Nano Tech 2200 30C – 4 штуки, поскольку при использовании одного накопителя время полета будет небольшим.
Рекомендуем:
- Зарядка гелевых аккумуляторов для скутеров
- Защита электродвигателя от перегрузок переменного тока и его работа
Для восстановления энергии в них необходима зарядка. Также потребуется для сборки своими руками контроллер, с помощью которого осуществляется регулировка полетом. Для пульта подойдет устройство Turnigy 9x. Улавливать сигналы с его помощью можно на расстоянии 800-900 метров. Передатчик сигнала идет в комплекте с пультом.
Сборка
Силиконовые провода помогут подсоединить двигатели к каждому пропеллеру. Аккумулятор с электроникой неплохо закрепить на платформе, установленной в центре рамы. Прежде, чем приступить к монтажу электронной начинки, следует скачать схему подключения, найти которую несложно на форумах. Если нужно, ДУ можно перепрошить с учетом последних обновлений. Там же, на форумах, рассказывают, как перепрошить пульт.

Собрать квадрокоптер своими руками по силам не каждому, поскольку он требует инженерных навыков. Но, если имеется инструкция и схема, процесс по созданию летающего девайся упрощается.
Пошаговая сборка
Люди, желающие собрать своими руками квадрокоптер, стремятся сэкономить, что вполне понятно. Но причина эта не единственная: многих вопрос интересует потому, что их хобби по управлению беспилотником переросло в желание участвовать в гонках и по возможности стать в них победителем. А для этого необходима доработка конструкции.

Сборка из комплекта
Обзаводясь соответствующим комплектом, можно значительно упростить процесс сборки своими руками ЛА.
Стоит он дешевле готового квадрокоптера в разы, поскольку заниматься сборкой, прошивкой, калибровкой и точной настройкой будет пользователь. Основным достоинством комплектов является отсутствие необходимости подбирать чипы, мощность двигателей, вес корпуса.
О сбалансированности, влияющей на поведение квадрокоптера в полете, тоже не стоит беспокоиться – всеми необходимыми параметрами, в том числе запланированной скоростью и временем нахождения в полете он обладать будет.
Комплекты позволяют собирать разборные и монолитные дроны своими руками. Тут решать пилоту, какую он желает иметь конструкцию. Разборными интересуются те, кто предпочитает модели габаритные, но и одновременно легко переносимые.
Но, для заметки: такие модели не отличаются привлекательным дизайном, поскольку внешнего корпуса, выполняющего декоративную и защитную функцию, в комплекте нет.
Как собрать подобную конструкцию своими руками, подробно описано в прилагаемой инструкции.
Как правило, начинается все с установки на пластиковый, карбоновый или металлический экзоскелет моторов. Затем размещаются PIN-кабели, регулирующие мощность моторов. Позже крепят на корпус приемник сигналов и управляющий модуль – мозговой центр.
На завершающей стадии устанавливают светодиоды, фиксаторы, аккумуляторы.
Сборка на этом заканчивается, но начинается самое интересное – прошивка, калибровка устройства и тонкая настройка, занимающая от 30 минут до 3 часов (в зависимости от производителя входящих в комплект деталей). К этому моменту аккумулятор должен быть полностью заряженным.
Сборка квадрокоптера из подручных материалов
Чтобы комплектующие в воздухе не развалились, их необходимо закрепить на легком, но прочном каркасе. Для изготовления такого подойти может все: палочки от мороженного, пластиковые бутылки и крышки.
Создавая корпус, нельзя забывать об устойчивости конструкции, собранной своими руками, равновесии, полетных качествах, легкости.
Если знания позволяют, схему можно придумать свою, если нет – найти в Интернет.
Первая сборка, как правило, лишь начало. В дальнейшем она будет многократно дорабатываться.

Есть одна хитрость, помогающая избежать сложных расчетов по балансировке – нужно выбрать конкретную модель, а под нее уже заказывать из базового списка комплектующие.
Главное, указывать правильно детали. К примеру, обязательно должно быть в списке по два мотора левого и правого вращения и соответствующие им винты. Иначе функционировать устройство не будет.
Если есть возможность, стоит заказать деталей больше – на случай замены бракованных (такое бывает). В отличие от продающихся наборов, своими руками (голыми) не получится собрать квадрокоптер.
Потребуются:
- клеевой пистолет;
- отвертка;
- паяльник;
- двухсторонний скотч;
- изолента.
Когда рабочая модель будет готова, настанет время модернизации, в результате которой у квадрокоптера могут появиться светодиоды, антенна, пищалки (биперы) и др., увеличивающие функциональность.

Квадрокоптер своими руками — сложная, но вполне осуществимая задача для людей, которые имеют базовые представления о радиотехнике. Существует несколько основных вариантов домашнего конструирования дрона.
Что нужно для сборки квадрокоптера
Набор деталей и расходных материалов может меняться в зависимости от того, какой именно дрон нужно сделать своими руками. Но базовый список элементов выглядит следующим образом:
- рама, на которой будут закреплены все остальные детали;
- четыре специальных двигателя для дрона;
- четыре пропеллера;
- четыре регулятора оборотов для винтов;
- два красных и два черных провода в силиконовой оболочке для моторов;
- силовой разветвитель 3,5 мм;
- литий-ионный аккумулятор — один или несколько;
- плата управления;
- зарядное устройство для батарей питания;
- пульт радиоуправления.
Чтобы собрать квадрокоптер из запчастей, практически все специфические детали можно приобрести в Интернете, например, через сервис АлиЭкспресс.
Чертежи и схемы квадрокоптеров
Чертежи для сборки квадрокоптера могут незначительно различаться между собой. Детали зависят от габаритов собираемого своими руками дрона, от его формы и конструктивных особенностей. Но базовый чертеж обычно предлагает сделать маленький квадрокоптер на крестообразной силовой раме с размерами 363 на 363 см. Параметры корпуса при этом составляют около 107 на 107 см, в таком случае в дроне без проблем размещаются основные детали.

Стандартно самодельные дроны собирают на рамах из четырех лучей
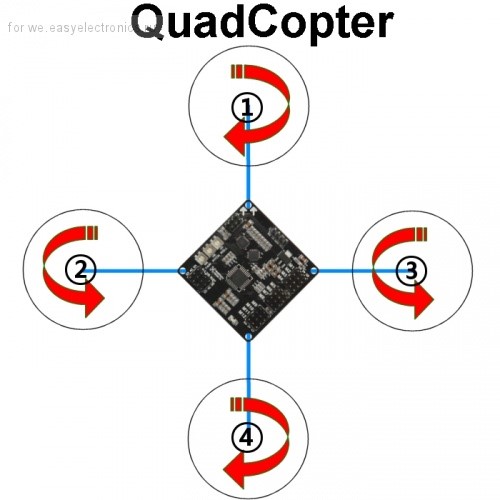
Структурная схема квадрокоптера выглядит очень просто. В центре конструкции на силовой раме всегда располагается электронная плата управления. По четырем углам на равном расстоянии друг от друга нужно поставить двигатели с закрепленными на них пропеллерами. В корпус в центре конструкции монтируют также элементы питания и радиодатчики для удаленного пилотирования.

Регуляторы оборотов на лучах необходимы для дронов, предназначенных для маневрирования
Важно! При сборке дрона своими руками нужно следить за тем, чтобы основная масса конструкции приходилась на центр и не смещалась в ту или иную сторону.
Как сделать самодельный квадрокоптер из бумаги
Простейший вариант сборки предлагает выполнить корпус аппарата из плотной бумаги. Такой квадрокоптер своими руками для начинающих будет очень легким, и управлять им в ветреную погоду не получится. Зато и больших расходов он тоже не потребует.
Сборка корпуса из бумаги
Прежде всего, при сборке бумажного дрона необходимо подготовить шаблон. Его можно нарисовать самостоятельно по одному из найденных чертежей, но гораздо проще скачать готовый вариант.

Бумагу для дрона нужно брать плотную, чтобы она не сминалась в процессе использования
Из готового шаблона острыми ножницами или ножом вырезают отдельные детали. После этого приступают к склеиванию частей — использовать можно ПВА или Момент по желанию. Важный нюанс состоит в том, что клея нужно наносить совсем немного и сразу же убирать его излишки. Даже небольшие застывшие капельки в конечном итоге влияют на массу и балансировку коптера.
Промазанные детали прикладывают друг к другу и слегка прижимают. После этого корпус оставляют сохнуть, а потом визуально проверяют качество сборки.
Установка электронной начинки
Чтобы бумажный дрон взлетел, на него необходимо монтировать электронику. Пошаговая инструкция для квадрокоптера своими руками выглядит так:
- сначала в центральной части рамы снизу устанавливают чипами вверх полетный контроллер с микропроцессором, полевыми транзисторами и сенсорами;
- затем при помощи той же клейкой ленты по углам располагают моторы и подводят к ним провода, закрепив их скотчем во избежание наматывания на винты;
- в центре рамы на двусторонний скотч ставят аккумулятор и соединяют его с моторами.
Готовый квадрокоптер своими руками из подручных материалов можно испытывать при помощи заранее приобретенного пульта управления.

Бумажный коптер требует использования максимально компактных и легких деталей при сборке
Как сделать мини-дрон своими руками в домашних условиях
Небольшой квадрокоптер можно смастерить своими руками из нескольких покупных деталей, клея и палочек от мороженого-эскимо. На его сборку понадобится потратить около 15 минут времени и минимум усилий.
Сборка силовой рамы дрона
Проще всего использовать для сборки самодельной рамы для квадрокоптера палочки от мороженого. Их склеивают между собой горячим или холодным клеем в виде решетки.

При сборке рамы дрона из палочек нужно следить, чтобы конструкция была пропорциональной
Установка электронной части и моторов
При помощи того же клея в центральной части рамы закрепляют аккумулятор, а по углам ставят четыре двигателя с мини-винтами. Под батареей питания закрепляют электронную плату, отвечающую за прием сигнала с пульта, и соединяют ее со всеми моторами. Чип контроля подключают также к аккумулятору.

После закрепления ножек мини-дрона нужно убедиться, что конструкция стоит на поверхности ровно
Проверка работоспособности
Собранный своими руками бюджетный квадрокоптер устанавливают на ножки, аккуратно прижимают отверткой к поверхности и нажимают на кнопку старта на пульте. Если пропеллеры благополучно закрутятся, дрон сделан успешно и сможет взлететь при проведении первого настоящего испытания.
Внимание! Мини-коптер, выполненный своими руками, не будет поддерживать регулировку оборотов и смену направления движения. Предназначена такая простая модель только для взлета и посадки.
Как сделать квадрокоптер с камерой своими руками
В домашних условиях реально провести сборку не только примитивного дрона, но и профессионального квадрокоптера своими руками. Для этого понадобится приобрести базовые детали — аккумуляторы, контроллер полета, моторы, провода и пульт ДУ. Также нужно купить камеру — компактную и легкую, но с хорошим разрешением.
Сборка рамы
Бумажная и картонная рама для коптера с камерой не подойдет, конструкция будет слишком тяжелой. При желании можно заказать готовую основу для дрона в Интернете. Но очень просто выполнить сборку и своими руками, например, из водопроводных пластиковых труб или легких алюминиевых профилей. Скрепляют детали между собой при помощи винтов или фитингов. На концах лучей рамы снизу можно сразу же прикрутить ножки, на которых будет стоять дрон.

Алюминиевая рама достаточно легкая и при этом очень прочная
Установка моторов
На каждом из лучей рамы необходимо установить по мощному компактному мотору. Закрепить их можно при помощи термоклея или резьбы. На верхнюю часть двигателей надевают винты. Лопасти для квадрокоптера своими руками обычно не делают — это требует использования фрезеровочного станка. Купить готовые пропеллеры намного проще и практичнее.
Сборка электроники
В центральной части аппарата устанавливают плату управления. Крепить микросхему лучше всего горячим клеем. Двусторонний скотч для массивных конструкций используют реже, поскольку он не обеспечивает надежной сцепки.

Контроллер для дрона с камерой следует выбирать подороже, с датчиками и режимами полета
Установка камеры
Для сборки летающего дрона своими руками для съемки оптимально использовать GoPro — легкую, небольшую по размерам экшн-камеру. В верхней или нижней части рамы для нее необходимо сделать специальную пенопластовую платформу, которая станет гасить вибрации от корпуса при полете. Камеру для надежности плотно закрепляют резинками.
Камеру на дроне можно закрепить в любой точке с хорошим обзором и минимумом вибрации
Установка регуляторов оборотов и подключение проводов
На данном этапе квадрокоптер для видеосъемки своими руками почти готов. Остается только соединить регуляторы оборотов с моторами и контроллером, а потом подключить плату управления к батареям питания. Также нужно не забыть вывести на полетный чип провода от камеры.

Моторы дрона с камерой в сумме должны давать подъемную силу, превышающую вес аппарата
Как сделать гоночный квадрокоптер своими руками
Сборка гоночного дрона по сути ничем не отличается от конструирования обычного квадрокоптера. Разница состоит в подходе к выбору деталей — нужно уделить особое внимание моторам, раме и винтам.
В случае с гоночным дроном основу лучше приобретать готовую. Она обеспечит оптимальную балансировку аппарата. Хорошим вариантом для сборки станет легкая и прочная рама из карбона со стандартными четырьмя лучами.
Сборка моторной части
Моторы для гоночного коптера закрепляют на лучах рамы винтами в специальных отверстиях. Двигатели должны быть достаточно мощными — например, хорошо подойдут 2205-2600 KV. В центральной части лучей устанавливают регуляторы оборотов и соединяют проводами с моторами. Винты для сборки гоночного дрона можно выбирать с двумя или тремя лопастями — первые дадут большую скорость, вторые облегчат процесс маневрирования.

Регулировка оборотов гоночному коптеру нужна обязательно, иначе он не сможет маневрировать
Установка электронной части
Стандартным способом на центральной пластине рамы закрепляют плату управления. Ее можно посадить на горячий клей или просверлить отверстия и зафиксировать небольшими винтами. В последнем случае конструкция после сборки получится надежнее. К раме прикрепляют приемник сигнала, который будет передавать команды на плату управления. Аккумулятор традиционно монтируют в нижней части устройства отдельно от микрочипа.

Камеру в гоночном дроне фиксируют в специальном гнезде на готовой раме
Подсоединение проводов
На финальном этапе сборки остается подключить к плате управления провода, отходящие от камеры и моторов. Сам микрочип при этом соединяют с аккумулятором.

При прокладке проводов нужно следить, чтобы они оставались подальше от лопастей дрона
Как сделать квадрокоптер для человека своими руками
Дрон для человека — пока что крайне редкий, небезопасный и дорогостоящий вариант для самостоятельной сборки. Общедоступных инструкций того, как самому в домашних условиях сделать квадрокоптер с огромной подъемной силой, пока не существует, поскольку обладателей таких аппаратов очень немного.
Однако краткий алгоритм создания грузоподъемного дрона можно описать, опираясь на стандартную схему.
Для сборки самодельного большого квадрокоптера подойдет только металлическая рама из стали, карбона или прочного алюминия. Другие конструкции просто не смогут поднять всю электронику и владельца дрона.

Болты для скрепления элементов рамы должны быть рассчитаны на нагрузку свыше 100 кг
Установка моторов и регуляторов оборотов
Двигатели для мощного квадрокоптера своими руками устанавливаются на лучах силовой рамы. Принципиальное внимание нужно уделить их производительности — суммарная тяга должна быть не меньше 120 кг. Добиться такого показателя реально при помощи восьми бесколлекторных моторов на 3 кВт каждый. К двигателям необходимо докупить регуляторы не менее 80 А. Детали соединяют между собой при сборке проводами, а к раме крепят исключительно на прочных винтах.

Для мощного дрона лучше брать моторы средней производительности со сниженной собственной массой
ёСборка системы управления
Плата с процессором в квадрокоптере для человека должна поддерживать регулировку оборотов пропеллеров, стабилизацию и смену направления. Ставят ее, как и во всех случаях, на центральной площадке, закрепляя винтами в просверленных отверстиях, и соединяют с моторной частью и приемником сигнала.
Аккумуляторов для коптера понадобится сразу несколько, и они должны обладать максимальной мощностью. Батарее придется питать восемь производительных моторов и к тому же поддерживать дрон в воздухе на протяжении хотя бы десять минут. Чтобы конструкция не получилась слишком громоздкой, при сборке проще связать аккумуляторы в съемный ранец, который сможет надеть на спину владелец.

Управление дроном для человека проводится с обычного пульта самим оператором
Посадочные ноги дрону для человека не пригодятся. Но понадобится предусмотреть в конструкции прочный подвес с лямками, который будет отвечать непосредственно за удержание оператора.
Внимание! Построить квадрокоптер для человека довольно дорого. Цена исчисляется десятками тысяч рублей, основные деньги уйдут на покупку моторов и батарей питания.
Заключение
Квадрокоптер своими руками — интересная и увлекательная задача для поклонников радиотехники. При желании в домашних условиях можно изготовить любой дрон, вплоть до моделей, способных поднять над поверхностью земли самого оператора.
Квадрокоптер — это не только весело и интересно. Такое устройство можно использовать для аэрофотографии, доставки небольших грузов, выполнения задач патрулирования, участия в соревнованиях. Именно для последней цели множество профессионалов предпочитает покупать не готовые модели, а собирать квадрокоптер своими руками. Сделать это можно и в домашних условиях. Главное — правильно подобрать комплектующие.
С чего начинать
Первое, что стоит уяснить начинающему, который решил сделать квадрокоптер своими руками: обойтись без покупки специальных комплектующих не получится. Летающая четырехвинтовая машина представляет собой достаточно сложную компьютеризированную систему. Поэтому приобретение специальной управляющей платы, сигналы с которой будут стабилизировать и направлять мультикоптер — является обязательным.

Несколько советов помогут собрать дрон с высокими шансами на положительный результат.
- Не стоит делать самодельный квадрокоптер большим. Разумно начать с надежной, устойчивой и прочной модели.
- Двигатели для дрона нужно выбирать с запасом. Во-первых, этим достигается большая свобода при сборке рамы. Мощные двигатели компенсируют ошибки, связанные с недостаточной грузоподъемностью. Во-вторых, характеристики большинства моторов китайского производства завышены.
- Минимальное количество проводки и соединений позволит как уменьшить массу, которую будет иметь самодельный дрон, так и минимизировать наводки и потери на сопротивление.
И главное — не стоит сразу пытаться делать квадрокоптер с камерой. Это устройство (если хочется получать качественное изображение) не только громоздкое и довольно тяжелое, но и неизбежно разбалансирует дрон.
Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые наборы для сборки. Это так называемые комплекты ARF. В них входит минимальный набор компонентов, чтобы сделать дрон своими руками с предсказуемыми характеристиками. При этом владельцу предлагается некоторая свобода в модификации параметров изделия путем замены лопастей, батарей и других комплектующих.

Наборы ARF обычно включают:
- детали рамы;
- основная печатная плата;
- двигатели;
- лопасти;
- батареи;
- соединительные шлейфы;
- крепежные элементы.
После того, как самодельный квадрокоптер собран, на него устанавливают систему управления. Ее можно купить отдельно.
Совет! Рекомендуется приобретать комплект из пульта и приемника. Они полностью синхронизированы между собой и не требуют сложной настройки.
Еще одно достоинство комплектов ARF — широкие возможности модификации летных характеристик дрона. Можно собрать квадрокоптер с большим радиусом действия, подключая его к соответствующей системе управления. Или обеспечить хорошие характеристики маневренности, используя специальные пульты.
Сборка в домашних условиях
Квадрокоптер можно собрать самому, в домашних условиях. Без покупки сложных электронных компонентов обойтись не получится. А вот силовую раму с ногами двигателей можно сделать из подручных материалов. Есть несколько вариантов сборки. Раму можно сделать из пластиковых труб водопроводной сети или собрать конструкцию из тонкого алюминиевого профиля квадратного сечения.
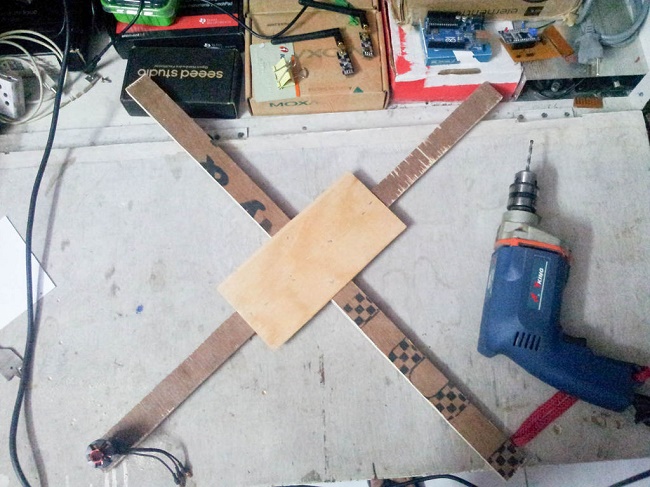


Самый простой способ — выполнить раму из фанеры. Для этого потребуется квадрат, размеры которого подбираются под габариты будущего коптера. К основанию рамы из фанеры будут крепиться ноги двигателей. Это может быть как готовое изделие промышленного производства, так и вручную изготовленные детали. Пошаговая сборка силовой рамы выглядит следующим образом.
- Делается чертеж конструкции, вид сверху. Соблюдается угол 90 градусов между ногами, равное расстояние между двигателями по диагонали.
- Определяется габарит центральной части из фанеры или профиля, путем разметки необходимых мест крепления ног.
- Если ноги двигателей сделаны из подручных материалов, например, низкого профиля — необходимо предусмотреть надежное место для крепления двигателей.
Сделать всю работу самостоятельно получится только у людей с высоким уровнем навыка моделирования и использования ручных инструментов. Требуется максимальная точность и минимальное количество материала.
Совет! Для начинающих рекомендуется купить готовую раму для сборки. Пользователь сразу получает изделие, у которого предусмотрено место для размещения батарей, двигателей, до минимума снижена масса.
Двигатели
Рекомендуется приобретать для сборки коптера в домашних условиях готовый комплект двигателей с системой управления. Это избавит от возможных отклонений в оборотах и других сложностях балансировки. Если же хочется все собрать самому, включая систему подъемных двигателей, следует ориентироваться на:
- диаметр пропеллеров, который вычисляется по размерам рамы;
- габариты посадочного пространства для двигателя (площадь и высота боковой опоры-стенки).

Далее делается выбор двигателя по его маркировке. Производитель всегда указывает диаметр статора и высоту двигателя. К каждому изделию приводится тип и размер лопастей, рекомендуемых к применению. После этого, основываясь на массе беспилотника и оборотах двигателя при зависании (указывается в паспорте) — подбирается конкретная марка пропеллера.
Выбор лопастей
Лопасти — одна из простых деталей, которым мало уделяют внимания начинающие. От конструкции данного элемента зависят летные характеристики дрона в целом. Рекомендации по выбору лопастей следующие.
- Если собирается квадрокоптер с камерой, нужно добиться минимальных вибраций при движении. Это позволяют сделать двухлопастные пропеллеры.
- Трехлопастные пропеллеры дают больше тяги, но для приведения их в действие требуется большая мощность двигателя.

Второй главный фактор выбора лопастей — материал, из которого они изготовлены. Для начинающих, при сборке первых моделей, можно купить пластиковые пропеллеры. Но стоит помнить, что они не отличаются прочностью. Пластик деформируется, высыхает (меняет жесткость). Кроме этого, в ходе эксплуатации лопасти повреждаются пылью и другими взвесями в воздухе, из-за чего растет их аэродинамическое сопротивление.

Металлические пропеллеры — оптимальный выбор, если хочется получить долговечный дрон со стабильными характеристиками. Стоят такие изделия дороже пластика, но служат гораздо дольше, показывая стабильные характеристики. Стоит помнить, что металлические пропеллеры неизбежно потребуют двигатели большей мощности для своего вращения.

Третий тип материалов, используемых для изготовления лопастей — композитные полимеры, многослойная конструкция. Такие пропеллеры легкие и прочные. Их цена высока, однако в области спортивных дронов композитные материалы лопастей не имеют конкурентов.
Важно! Если сборка квадрокоптера в домашних условиях планируется впервые, то при покупке лопастей не стоит экономить. Нужно внимательно изучать приводимую производителем разницу в массах отдельных пропеллеров в комплекте. На практике, покупая набор лопастных блоков дороже всего на 10% от средней цены, можно избавиться от работ по балансировке системы.

Система управления
Система управления, рекомендованная к покупке для начинающих, состоит из пульта и приемника, устанавливаемого на коптере. Сегодня на рынке представлено великое множество комплектов, предлагающих разный функционал. Например, может быть реализована:
- система взаимодействия по радио или Wi-Fi каналу;
- GPS для ориентирования и движения по маршруту;
- схема позиционирования, работающая не в 2, а в 6 и более степенях свободы;
- система автоматического гашения инерции, позволяющая дрону висеть полностью неподвижно и сразу останавливаться при поступлении команды баз паразитных раскачиваний.

От класса решения напрямую зависит стоимость системы управления. Поэтому рекомендуется тщательно проанализировать сферу применения и задачи коптера перед выбором того или иного комплекта его электроники.
Алгоритм сборки
Сборка квадрокоптера не представляет большой сложности.
- Делается рама, сборкой готового комплекта или создания конструкции из подручных материалов.
- На центральную пластину рамы крепится электроника управления. Это плата, регулирующая обороты двигателей и обрабатывающая сигналы с пульта.
- К плате управления присоединяется приемник радиосигнала. Его можно закрепить на раме термоклеем.
- Строго на равных расстояниях от центра рамы до оси привода, на ногах сверлятся отверстия для крепления двигателей.
- Прокладываются провода, силовая сеть управления двигателями. Если покупался комплект оборудования, в нем есть все нужные проводники и инструкция. В случае, когда работа делается своими руками, стоит помнить: проводка соединяется в соответствии с типом управляющей платы, схема подачи питания параллельная.

Завершается сборка тщательным изолированием мест соединения проводов термоусадкой. При необходимости защиты плат управления от влаги, они накрываются кожухами. После этого можно присоединять аккумулятор и тестировать коптер в работе.


В качестве заключения
Если не экономить на покупке комплектующих, собрать самодельный дрон не составит труда. Достаточно действовать аккуратно, в соответствии с инструкциями производителя тех или иных компонентов. Как правило, после первой удачно собранной модели у начинающих появляются амбиции и желание собрать дрон с улучшенным функционалом. Чтобы минимизировать траты, следует предусмотреть такой вариант заранее. Например, купить плату управления, поддерживающую прямое подключение камеры или передачу сигнала на смартфон по протоколу Wi-Fi.
Сделать самодельный квадрокоптер своими руками не сложно. Это гораздо проще, чем, к примеру, сделать самодельную авиамодель или радиоуправляемый вертолет.
Основа самодельного квадрокоптера - это рама. Ее можно купить готовую или сделать своими руками.
Самый простой вариант - купить готовую раму.
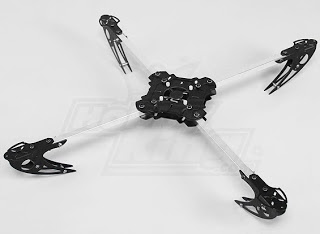
Рама Hobbyking X525 V3
Габариты: 600 мм
Материалы:
Ноги и центр. часть: текстолит
Лучи: алюминий
Цена: 550 рублей
Преимущество готовой рамы над самодельными в том, что все уже подготовлено для установки электроники и не надо искать материалы для изготовления.
Впрочем, раму для самодельного квадрокоптера можно сделать своими руками из практически любых материалов.

Вот, к примеру, квадрик изготовленный из линеек и пеноплекса (пенопластовый утеплитель).

А этот самодельный квадрокоптер сделан из пластиковых труб для водопровода.
Причем, такие самодельные квадрокоптеры летают ничуть не хуже заводских!

Если вы хотите сделать красивый и оригинальный квадрокоптер - то смотрите эту статью. В ней вы найдете чертежи квадрокптера как на фотографии выше и подборку электроники для него.
Но рама в четырех моторных агрегатах - не главное! Главное в них это мозги - плата управления с гироскопами, магнитометром и бародатчиком.
Давайте посмотрим, какую плату можно поставить на квадрокоптер сделанный своими руками.
%5B1%5D.jpg)
HobbyKing KK
Это самая дешевая и простая плата управления квадрокоптером. На ней установлены только 3 гироскопа. На самодельный квадрокоптер такую ставить можно только в случае если не планируются полеты с помощью камеры (FPV полеты) и только в случае максимального удешевления квадрика. Такие (или подобные ей) платы ставят на квадрокоптеры-игрушки или дешевые квадрокоптеры на Ebay.
Для настройки квадрокоптера придется докупить ISP программатор.
MultiWii Lite V1.0
Цена: 960 рублей
Достоинства MultiWii Lite V1.0 - небольшие размеры, всего 40х40 мм и вес 9 грамм. В комплекте идет программатор для подключения к USB порту компьютера.
Эта плата управления квадрокоптером идеально подходит для изготовления небольших квадрокоптеров своими руками.
%5B1%5D.jpg)
MultiWii 328P
ITG3205 Трехосевой гироскоп
BMA180 Акселерометр
BMP085 Барометр
HMC5883L Магнетометр
Цена: 1050 рублей
MultiWii 328P - это наиболее оптимальная по отношению цена/качество плата управления.
Программатор вшит в плату, акселерометр позволяет компенсировать дрейфы гироскопов, бародатчик - автономно висеть на заданной высоте, а магитометр (фактически компас) включать режим управления, когда коптер может лететь по прямой вращаясь вокруг своей оси.
Такое сочетание датчиков позволяет не только полностью автономно контролировать квадрокоптер, но и управлять гироподвесом камеры держа ее параллельно горизонту при любых эволюциях самодельного квадрокоптера.
Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
Однако, кроме платы управления не малую роль играют регуляторы оборотов электродвигателей.
Рекомендуется покупать специальные регуляторы для квадрокоптеров - Turnigy MultiStar, их не надо дополнительно перепрошивать.
Для самодельного квадрокоптера размерами 450-600 мм подойдет следующие регуляторы:
%5B1%5D.jpg)
Turnigy Multistar 30 A
Цена: 450 рублей
Купить регулятор можно тут .
Turnigy Multistar 20 A
Цена: 360 рублей
Купить регулятор можно тут .
Для 450-500 мм квадрокоптера берем 20 амперные регуляторы, а для 500-600 на 30А.
Впрочем, если поставить регулятор на 30А вместо 20ти амперного, то он просто будет меньше греться. Токопотребление задают моторы.
Двигатели для самодельного квадрокоптера

Turnigy Aerodrive SK3 2822-1275
Цена: 570 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 20 А.
%5B1%5D.jpg)
Цена: 580 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 30 А.

Turnigy Multistar 2216-800Kv
Цена: 990 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 30 А.
Похожие статьи:
Плата MultiWii 328P, ее можно заменить я так понимаю на более мощную вот эту Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) или вот эту Полетный контроллер MultiWii MicroWii на МК ATmega32U4 USB/BARO/ACC/MAG . Если нет то какие подходят для создания "летающей камеры". Я в этом новичек поэтому сильно не пинайте. И я так понимаю для подвеса камеры приведенный тут каркас не подходит?
Фактически можно ставить любой полетный контроллер.
На сегодняшний день наиболее хорошо отзываются о Naza.
Для автовозврата квадрокоптера при потере связи нужна плата с поддержкой модуля GPS и сам модуль.
Если не отлетать дальше 100 метров и использовать только режим "ручного управления" - то подойдет любой.
Если предполагается "удержание точки висения в автоматическом режиме" то посоветую Naza Lite с GPS или Naza V2 с GPS.
Multiwii и Megapirate - контроллеры хорошие, к ним можно подключать GPS, но в настройках надо разбираться и поднастраивать под свой квадрик. Не слишком сложно, но пару дней займет.
Та же Наза фактически "летает из коробки", за что ее и любят, не смотря на более высокую цену.
А можно ли сделать такой же с двигателем внутреннего сгорания.
Это не шпионская штука ( звук выхлопа).
К примеру для обследования ЛЭП.
Естественно с полетом по картинке камеры и скорее всего по сетке типа прицельной ( ЛЭП не игрушки),
Это если учитывать возможность повреждения ЛЭП роторами и корпусом ( нельзя использовать углепластики и стеклоткани без покрытия? знаете почему).
Нет. Только если ДВС будет крутить генератор, а моторы с винтами будут стоят электрические.
Попытки сделать квадрик на двс были, но толку не имели, тк двс весьма медленно меняют обороты и имеют большую вибрацию.
Дальнейшее обсуждение этой темы возможно только в форуме.
Может и будет крутить.
Кстати мне очень не нравится слабость эл. моторов такой техники ( хотя компенсацию порывов ветра на электротяге делать проще) и естественно автономка с батареями ( ну не просить же продать /отдать батареи СЦД -5).
Заряжать долго и батареи Li -on не панацея.
Хотя не спорю управлять проще и рулевые машинки (которые дороги) не нужны.
Ничего, что современные бесколлекторники на порядок мощнее ДВС при том же весе? А LiPo заряжаются за 10 минут?
И да, классической схемы мульткоптеров на ДВС просто не существует (лабораторные проекты не в счет - они и в лабораториях толком не летают).
А почему нет? Только сложнее намного получится. Двигатель, четыре вала на винты, вместо регулирования оборотов регулирование шага рулевыми машинками. Проблема будет в том, что не получится просто подобрать набор стандартных компонентов. По крайней мере "раздаточную коробку" придется самому сочинять и изготавливать.
Дисскуссия уже не по теме статьи, предлагаю переместиться в форум.
По теме - попробуйте сделать, потом поделитесь результатами. На электродвигателях такие варианты продаются, привод на зубчатых ремнях.
Добрый день!
КвадроЛетчик, хочу сам собрать квадрокоптер, но есть жесткие требования к нему:
Должен получиться достаточно мощный квадрокоптер, который не сносит ветер, с дальностью управления около 1 км, с GPS и можно будет использовать камеру с высоким качеством съемки.
Готовые стоят космически дорого. Хочу сам собрать из комплектующих.
Вы можете мне посоветовать, как мне нужны запчасти: рама, моторчики, "мозги", аккумулятор и т.д.
здраствуйте , хочу спросить: обязательно ли покупать регуляторы скорости? или можно без них? и ещё: плата и регулятор полёта это разные вещи?
Упрощенно: регулятор получает цифровой сигнал и на основании его преобразует постоянный ток в фазовый, управляя тем самым оборотами двигателя.
Так что без регуляторов - никак!
Как делают квадрокоптеры без регуляторов? например Syma x5 там их нету.возможно лои собрать без них как у Syma x5?
Там коллекторные двигатели (2 провода), их хватает примерно на 100 полетов. Потом менять. Впрочем, часто и после 15-20 полета один из двигателей - под замену.
Коллекторные регуляторы сделаны прямо на плате.
В DJI Phantom 3 - та же история, регуляторы на плате, если сдохнет регулятор (бывает при падении, мотор не отключился уперся винтом и регулятор сгорает), менять придется всю плату.
Интересно, а как можно оценить вес, которой может поднять коптер? Вот, например, мне нужно поднять 500 граммов. Как исходя из этого расчитать коптер?
Зарегистрируйтесь, создайте в форуме тему, опишите что именно вы хотите поднимать и как долго и куда носить.
500 грамм - это обычно полноценная фотокамера с подвесом.
У фото полетов своя специфика и коптеры под нее имеют отдельные особенности.
Целый сайт именно про это, а вам лень посмотреть другие статьи, надо обязательно перечислять в комментариях?
Здравствуйте! Подскажите, пожалуйста, можно ли вместо MultiWii 328P, использовать MultiWii SE v2.5 ? Насколько сильно они отличаются?
А если использовать APM 2.6? Насколько сложно будет его настроить? Стоит ли его брать?
Здравствуйте! Можно собрать квадрик своими руками на карбоновой раме? Для проф. видеосъёмке, чтобы висел не шелохнувшись и летал за 3-4 км.? Наличие GPS обязательно.
Подскажите какие комплектующие нужны? Или марку готового, но желательно весом не менее 3-4 кг. Спасибо.
Можно, но лучше обратиться к тем, кто это делает на проф. основе. Так как потребуется доступ к ЧПУ станку или 3Д принтеру.
Современные GPS/ГЛОНАСС приемники вполне позволяют получить зависание в одной точке.
Для компенсации порывов ветра необходим 3Д подвес.
Подбирать комплектующие необходимо комплексно, обычно начинается с того, что решается какую камеру катать. Затем - рассчитывается масса подвеса (берется готовый или делается самостоятельно), От веса подвеса с камерой стартуется обсчет самого квадрокоптера.
Надо учесть - будет ли 8 моторов на 4-х осях (защита от падения при поломке любого из моторов) или упростить конфигурацию (и удешевить ее) до стандартных 4-х моторов.
Под конфигурацию побираются моторы, регуляторы, аккумуляторы, выбирается полетный контроллер (минимальные настройки или максимальный ручной тюнинг настроек), делаются чертежи и по ним приступают к изготовлению деталей и сборке.
По сути - процесс сборки это рутина. По времени, 90% тратится на подготовительный этап.
Встал вопрос создания 3D модели участка местности с сеткой точек 1м х 1м. Участок 223 Га с перепадами высот по гугл карте от +40 до +140 (холмы). Так как проект не коммерческий, то хочу обойтись своими силами и собрать свой коптер.
Подскажите пожалуйста на какие модели деталей (желательно не шипко дорогие) нужно обратить внимание?
По функциям дрона хотелось бы иметь:
1. Авто взлет
2. Авто посадка
3. Возврат по низкому заряду батареи или нештатной ситуации.
4. Программируемость маршрута и высоты полета (т.е. возможность задания сетки точек для облета до полета.)
5. Камера 4К (или возможность нести на себе аналог Гоупро или Wifi IP камера)
6. Авто Облет препятствий.
7. Дальность 3-5км с обратной связью (в процессе полета видеть что он там снимает и писать на внешний источник поток видео с дрона)
8. Время в полете от 30 минут
9. GPS
10. Возможность записи высот по точкам облета. (высоты над ур. моря точки на земле)
И еще есть пылесосы которые умеют парковаться на базу и заряжаться.
Вопрос. А квадрокоптеры есть такие, которые умеют самостоятельно парковаться на базу для подзарядки??
(это чисто моя фантазия. На стройке для хозяина удобная фишка. Прям с компа стартовать дрон и смотреть за стройкой. или автоматизация охраны, сработал датчик движения и двон стартовал посмотреть и записать что там шевелится. )
Читайте также: